This is an tensorflow implementation of "Learning Object Pose Estimation with Point Clouds"

- data: a color, a depth and a label image for testing.
- models: a python file defining model structure.
- object_model_tfrecord: full object models for visualization purpose.
- trained_network: a trained network.
- utils: utility files for defining model structure.
- log: directory to store log files during training.
- losses: loss functions for training.
- data_process_tools.py: tools for data pre-processing.
- object_6d_pose.py: main file for testing object 6d pose estimation with a trained network.
- train_6d_pose.py: script for training a network.
- Tensorflow-GPU (tested with 1.12.0)
- transforms3d
- open3d for visualization
- Available classes in the test scenario are:
- 1: 003_cracker_box
- 3: 005_tomato_soup_can
- 4: 006_mustard_bottle
- 9: 011_banana
- 14: 035_power_drill
- After activate tensorflow
python object_6d_pose.py --trained_model trained_network/20190222-130143/model.ckpt --batch_size 1 --target_class 9
- --trained_model: directory to trained model (*.ckpt).
- --batch_size: set to 1 because only 1 test example is provided in this test.
- --target_class: target class for pose estimation.
- Translation prediction is in unit meter.
- Rotation prediction is in axis-angle format.
- Result
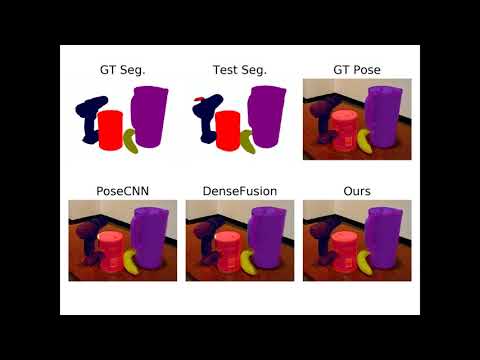
- If you turn on visualization with b_visual=True, you will see the following displays which are partially observed point cloud segments (colored) overlaid with object model (green) with pose estimates.
- The coordinate is the object coordinate, object segment is viewed in the camera coordinate





- Training data in tfrecord format is available
- Download zip file
- Unzip and place all 42 files in ycb_video_tfRecords/FPS1024/
- Change path data_dir and object_model_dir in train_6d_pose.py according to your setup
- Run script
python train_6d_pose.py
- Log files and trained model is store in log
- For reproducing the results in the paper, it takes around 22 hours to trained the model for 90 epoches on a TITAN X (Pascal). Better results might be achieved if you have more time and patience for training :D
This is an example on how to create the tfrecords in ycb_video_tfRecords/FPS1024/.
- For an easier data access, we first write the YCB_Video_Dataset in to tfrecords, sorted by sequence.
- In ycb_video_data_tfRecords/script, run script
1_ycb_to_tfrecord.py
This will create files e.g. 0000.tfrecords (for master_chef_can) in sort_by_seq. An example can be downloaded here.
- Create point cloud segments with pose labels for training by running script
2_dataset_to_tfRecord_small.py
This will write the training data into FPS1024.
Note that the point cloud segment (contains 256 points) is a small subsample of original segments (contains ~thousand(s) of points) created with farthest point sampling (FPS) with random starting point.
(to be added)
Further details are available in our paper on the subject. If you use this code in an academic context, please consider cite the paper: arxiv version
BiBTeX:
@inproceedings{gao2020cloudpose,
title={6D Object Pose Regression via Supervised Learning on Point Clouds},
author={G. Gao, M. Lauri, Y. Wang, X. Hu, J. Zhang and S. Frintrop},
booktitle={ICRA},
year={2020}
}
- The building block for this system is PointNet.