(Gen2.1.13.1) - Resultados de Autodetect Hover-1 Drive #67
Comments
|
It would be good to have the BUTTON pin :-/ |
|
led button latch those is just good to know not really important in project |
|
This could be 2.1.13 👍 |
Yes we need to know if the PA2/PA3 autodetect firmware was used or the PB6/PB7 |
|
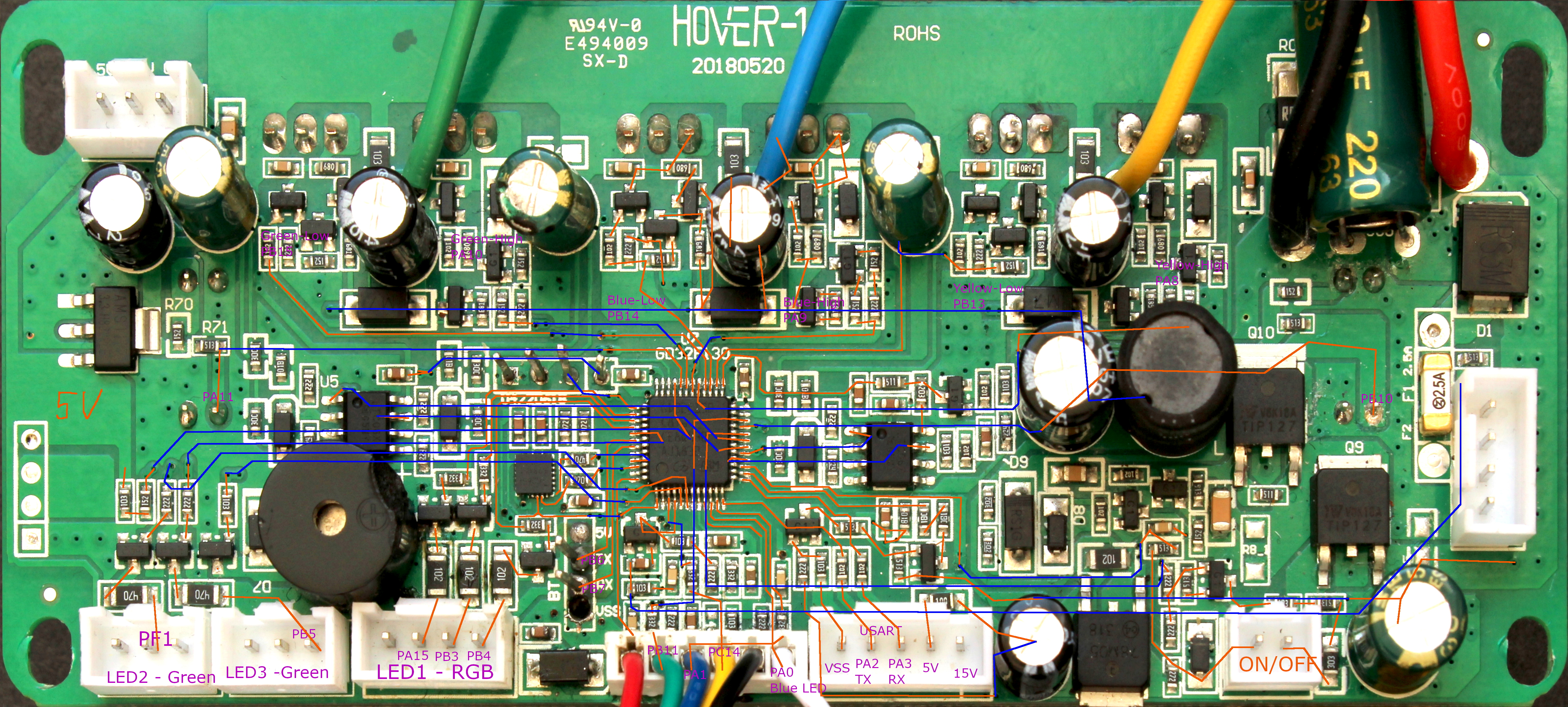
The autodetect results show PA7 for two different pins, this should not be possible by my software: @llms3555 please post the complete log of the autodetect :-) We have already a defines_2-1-13.h and hall and phase have been detected correctly by my autodetect: #define PHASE_CURRENT_G PB1 // robo from pin tracing photo, maybe wong order But the rest ist wrong: @llms3555 can you confirm that your board is the same as in #38 ? Then this bianry should already spin forward and backwards: https://github.com/RoboDurden/Hoverboard-Firmware-Hack-Gen2.x/blob/main/BinariesToTest/hoverboard%202.1.13%20master%20Dummy.bin |
|
Itotal and phasea use same comparator |
|
This new Hover-1 The OnOff/BUTTON header is now directly beside the hall header and the dcdc step down components are different. Should i assign a new layout number ? @llms3555 please publish full autodetect log output here. |


|
Disculpa la demora el tablero numero 38 es casi el mismo pero no totalmente tiene más conectores, cambian la posición del conector y el firmware de prueba 2.1.13 funciona las ruedas giran hacia atrás y adelante, prende el led azul del frente del hoverboard, también probe el el firmware (hoverboard 2.1.8 master Uart.bin) el pitido suena bien y prende el led de encendido en verde el problema de ese es que no hace nada en la conexión uart utilice el código testspeed con una esp32 y lo conecte por conexión uart pero no hace nada solo funciona el uart en el autodtect. |
|
Deepl:
dumny.bin does not have uart support. You need to compile with RemoteUart in config.h |
|
A entiendo que firmware funcionaria para conexion uart ??? |
|
I will upload 2.1.13_Uart.bin tomorrow. |
|
Entiendo, entonces esperaré hasta mañana. Agradezco mucho su tiempo y su ayuda. ¡Muchas gracias! |
|
@llms3555 , Lots of 2.13 binaries to test: https://github.com/RoboDurden/Hoverboard-Firmware-Hack-Gen2.x/tree/main/BinariesToTest Only The other uart/uartBus binaries need to connect here: Please give feedback what is working for you and what not. |


|
Entiendo muchas gracias probare todos te aviso después como salieron los resultados. |
|
Este codigo de arduino funcionara en mi version de hoverboard : #define ESP32 // comment out if using Arduino #define SEND_MILLIS 100 // send commands to hoverboard every SEND_MILLIS millisesonds #include "util.h" #ifdef ESP32 void setup() #ifdef ESP32 pinMode(LED_BUILTIN, OUTPUT); unsigned long iLast = 0; void loop() int iSpeed = 3 * (ABS( (int)((iNow/20+100) % 400) - 200) - 100); // repeats from +300 to -300 to +300 :-) if (iNow > iTimeNextState) boolean bReceived; if (iNow > iNext) #endif } |
|
So you are using |
|
Este estoy utilizando: |
|
This can not work if you do not remove the
|
|
A entiendo entos corregire eso. |
|
Que comandos usaria para poder mover las llantas libremente. |


|
!He descubierto cómo hacerlo! El hoverboard funciona perfectamente ahora. Aprecio enormemente tu esfuerzo y ayuda. ¡Gracias de verdad! |
|
Hola, una disculpa por la molestia, como podría programar en esp32 que tiene dos RX y TX para hacer que las dos llantas se sincronicen al mismo tiempo ya que las dos placas son maestro y como se controlar el tiempo de giro de la llanta. |
|
if you need only tx no rx then you can just set 2 same slave id and they will be synchronized |
|
Funciona para también rotar el hoverboard ? |
|
The first rule of project Mayhem: you do not ask questions! |
|
Understood, I won't ask any more questions. I hope I haven't caused any inconvenience. |
Resultados:
#define CURRENT_DC PA7
#define HALL_A PC14
#define HALL_B PA1
#define HALL_C PB11
#define PHASE_A PA7
#define PHASE_B PB0
#define PHASE_C PB1
//#define LED_RED P??
//#define LED_ORANGE P??
//#define LED_GREEN P??
//#define UPPER_LED P??
//#define LOWER_LED P??
//#define ONBOARD_LED P??
//#define BUZZER PA5
//#define VBATT P??
#define CURRENT_DC PA7
#define SELF_HOLD PA4
//#define BUTTON P??
The text was updated successfully, but these errors were encountered: