Official Pytorch implementation for the paper: "RVCDet: Rethinking Voxelization and Classification for 3D Object Detection" [ICONIP-2022]
![]()

[14-04-2023] RVCDet paper is available on Springer.
[23-11-2022] RVCDet presentation at The 29th International Conference on Neural Information Processing.
[13-09-2022] RVCDet is accepeted at ICONIP 2022
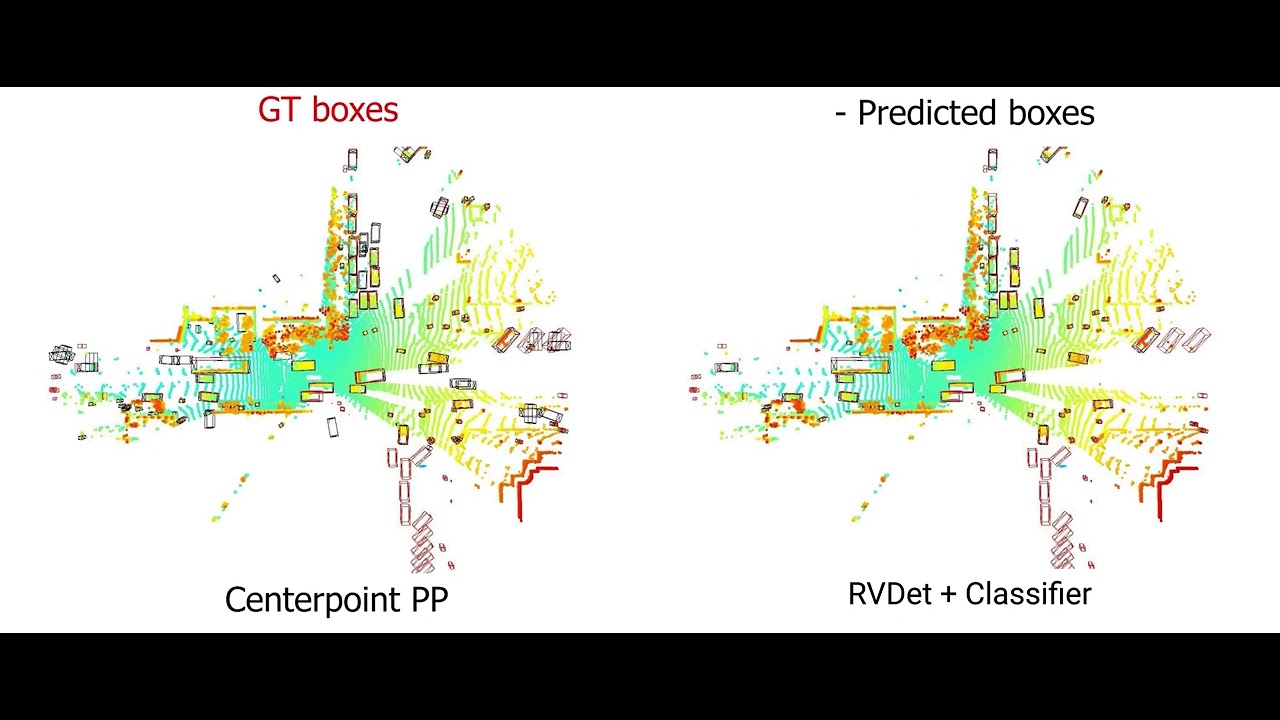
The main challenge in 3D object detection from LiDAR point clouds is achieving real-time performance without affecting the reliability of the network. In other words, the detecting network must be enough confident about its predictions. In this paper, we present a solution to improve network inference speed and precision at the same time by implementing a fast dynamic voxelizer that works on fast pillar-based models in the same way a voxelizer works on slow voxel-based models. In addition, we propose a lightweight detection sub-head model for classifying predicted objects and filter out false detected objects that significantly improves model precision in a negligible time and computing cost.
| Model | Range | mAP/L1 | mAPH/L1 | mAP/L2 | mAPH/L2 | Latency |
|---|---|---|---|---|---|---|
| RVDet | PerType | 0.7287 | 0.7095 | 0.6721 | 0.6541 | 43 ms |
| no ground | [0, 30) | 0.8266 | 0.8075 | 0.8075 | 0.7888 | |
| [30, 50) | 0.6969 | 0.6775 | 0.6465 | 0.6283 | ||
| [50, +inf) | 0.5721 | 0.5530 | 0.4863 | 0.4694 | ||
| RVDet | PerType | 0.7374 | 0.7176 | 0.6807 | 0.6621 | 47 ms |
| [0, 30) | 0.8323 | 0.8129 | 0.8134 | 0.7945 | ||
| [30, 50) | 0.7065 | 0.6875 | 0.6558 | 0.6379 | ||
| [50, +inf) | 0.5840 | 0.5612 | 0.4974 | 0.4772 |
Follow the provided steps to reproduce our results on Waymo validation and test sets.
Please refer to INSTALL to run the docker container for RVCDet. For training and testing on Waymo, please follow the instructions in START.
RVCDet is released under MIT license (see LICENSE). It is developed based on a forked version of FMFNet based-on CenterPoint.
If you find this work helpful, please consider citing:
@InProceedings{10.1007/978-981-99-1645-0_39,
author="Murhij, Youshaa
and Golodkov, Alexander
and Yudin, Dmitry",
editor="Tanveer, Mohammad
and Agarwal, Sonali
and Ozawa, Seiichi
and Ekbal, Asif
and Jatowt, Adam",
title="Rethinking Voxelization and Classification for 3D Object Detection",
booktitle="Neural Information Processing",
year="2023",
publisher="Springer Nature Singapore",
address="Singapore",
pages="470--481",
isbn="978-981-99-1645-0"
}
Questions and suggestions are welcome!
Youshaa Murhij yosha[dot]morheg[at]phystech[dot]edu
Alexander Golodkov golodkov[dot]ao[at]phystech[dot]edu
Dmitry Yudin yudin[dot]da[at]mipt[dot]ru