Sending commands to drone in the X-Plane simulator with inav SITL #9246
Replies: 3 comments
-
|
In principle, sending MSP to the SITL works fine, for example fl2stil provides RC commands via There is also further information on automation in the wiki. In particular for arming and sending RC commands there are specific status requirements and update rate requirements. |
Beta Was this translation helpful? Give feedback.
-
|
try to change from SIM (SITL) to MSP |

Beta Was this translation helpful? Give feedback.
-
|
@NikitaYeryomin have you resolved an issue? Have the same and looking for the solution. Approach from @pogopo789 change stick values in iNav configurator, but not affect simulation in RealFlight Any help would be appreciated |
Beta Was this translation helpful? Give feedback.
-
Hello INAV community,
I'm currently in the process of developing an autopilot system, with the decision-making software running on a Jetson Nano. My primary objective is to have the drone react in a simulator based on commands sent from my script.
I'm using the following setup:
X-Plane 11 simulator from Steam on Windows 10 with NK_FPVSurfwing model from the INAV-X-Plane-HITL repo. I have configured Data output to the 49000 port. Settings can be viewed below: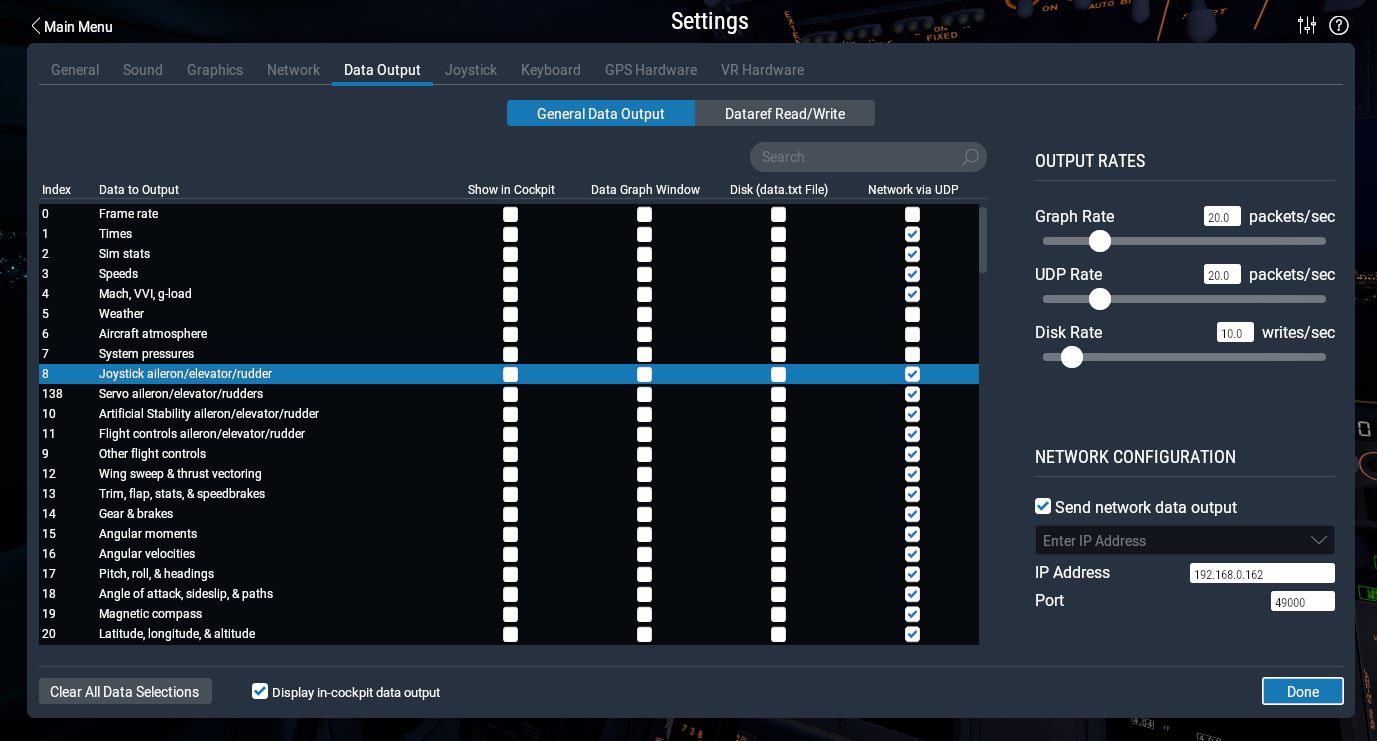
I've also enabled all datarefs I found in the xplane.c code of the inav SITL.
inav_SITL running on the same host in WSL (Ubuntu 20.04) with the following command line:
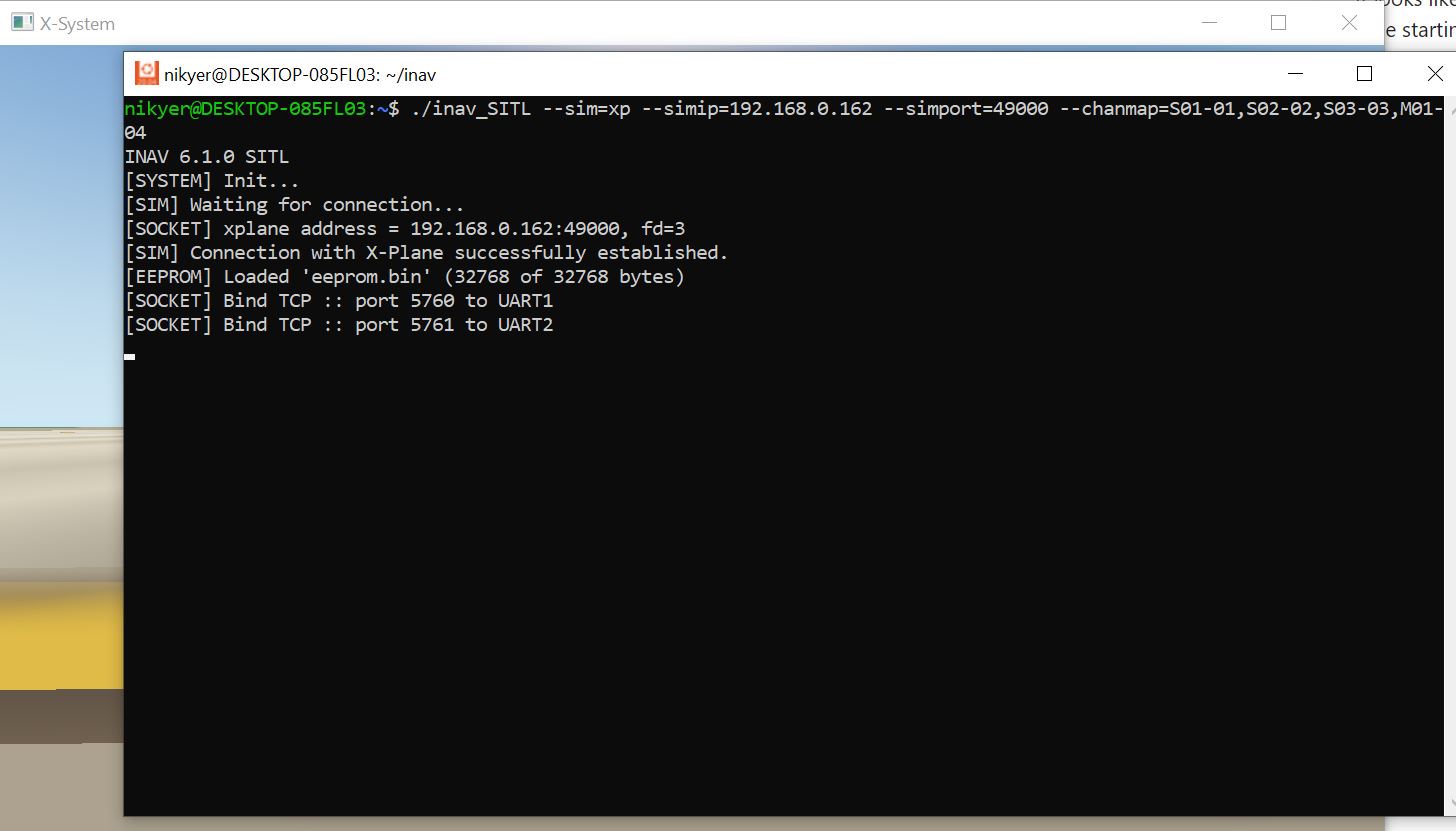
inav_SITL --sim=xp --simip=192.168.0.162 --simport=49000 --chanmap=S01-01,S02-02,S03-03,M01-04It's able to successfully connect to X-Plane:
INAV Configurator 6.1.0 - successfully connects the inav_SITL on port 5760 and I can see it receives the data updates from the simulator: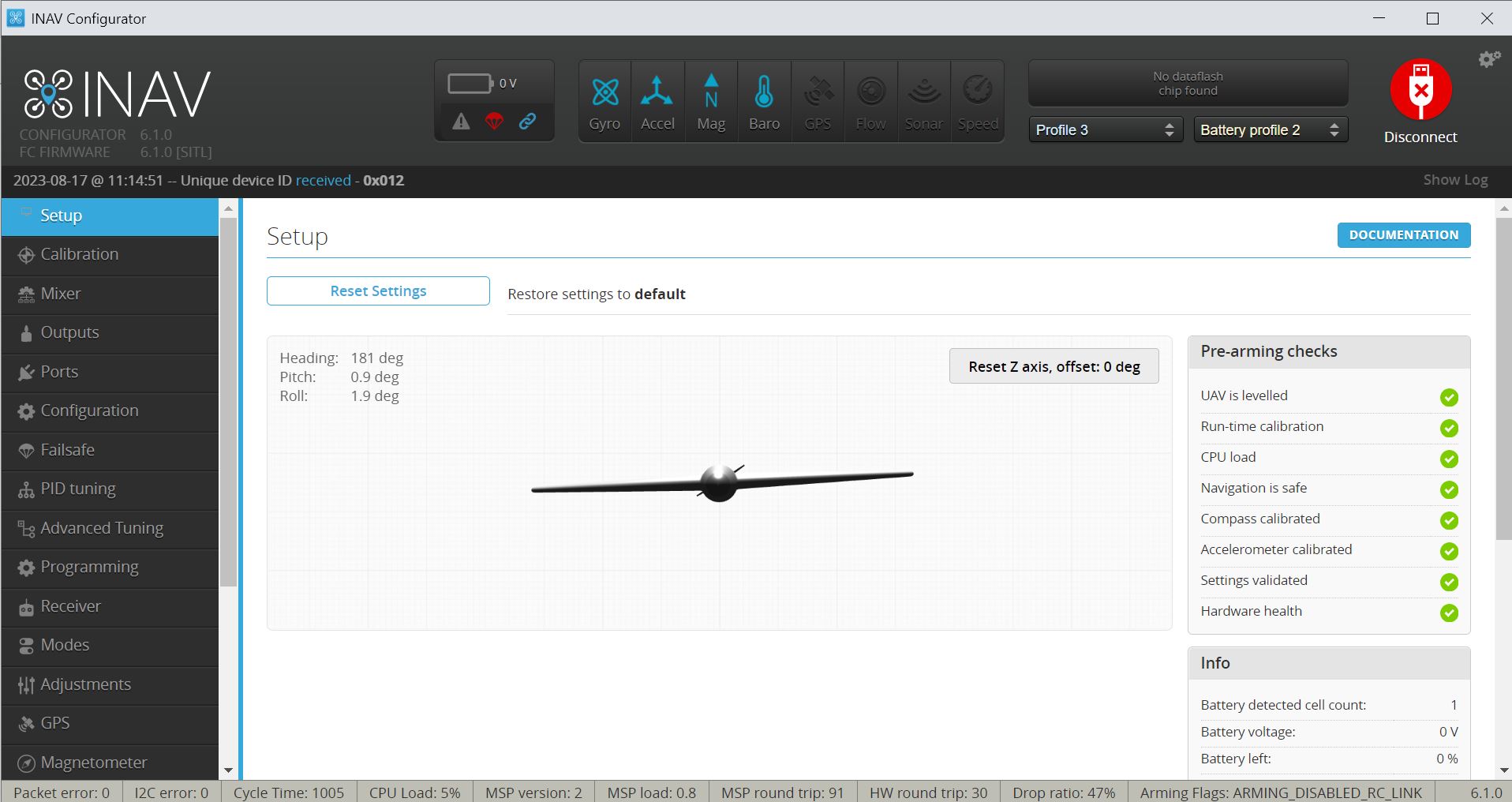
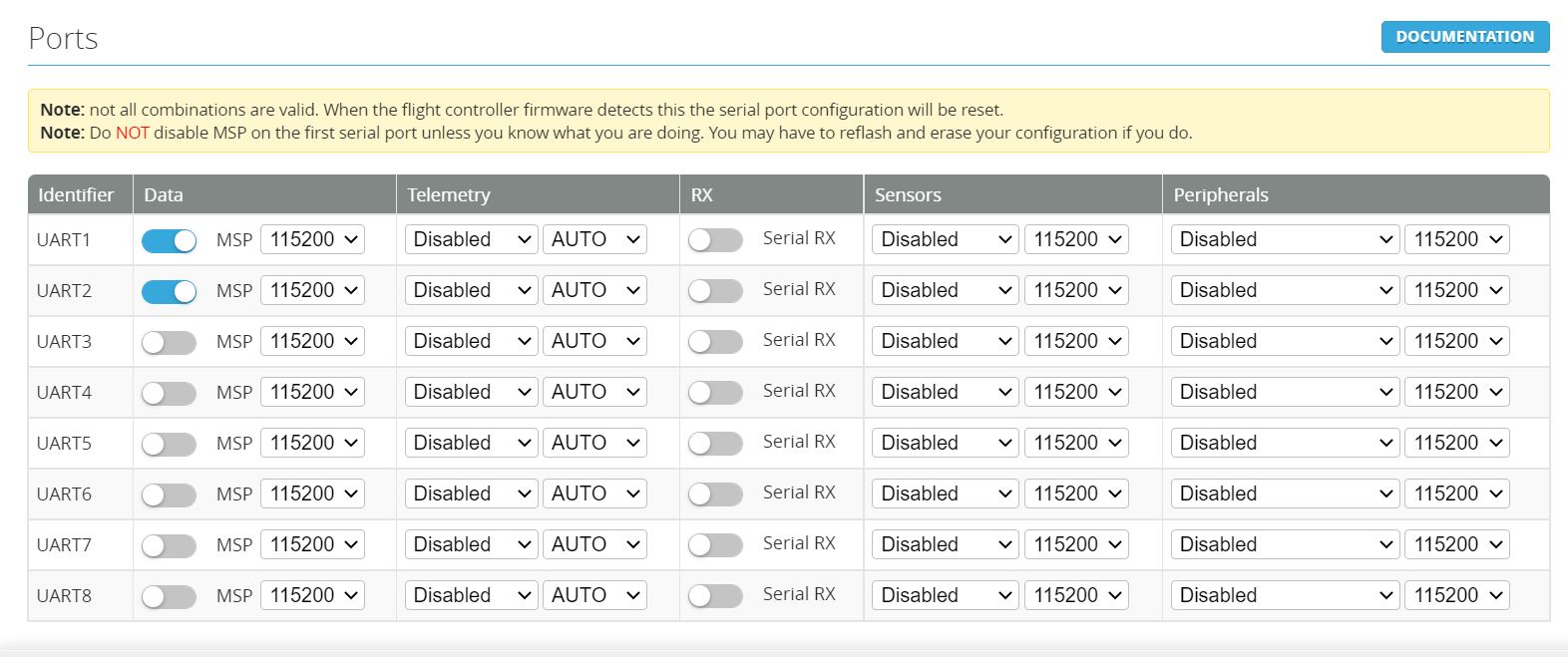
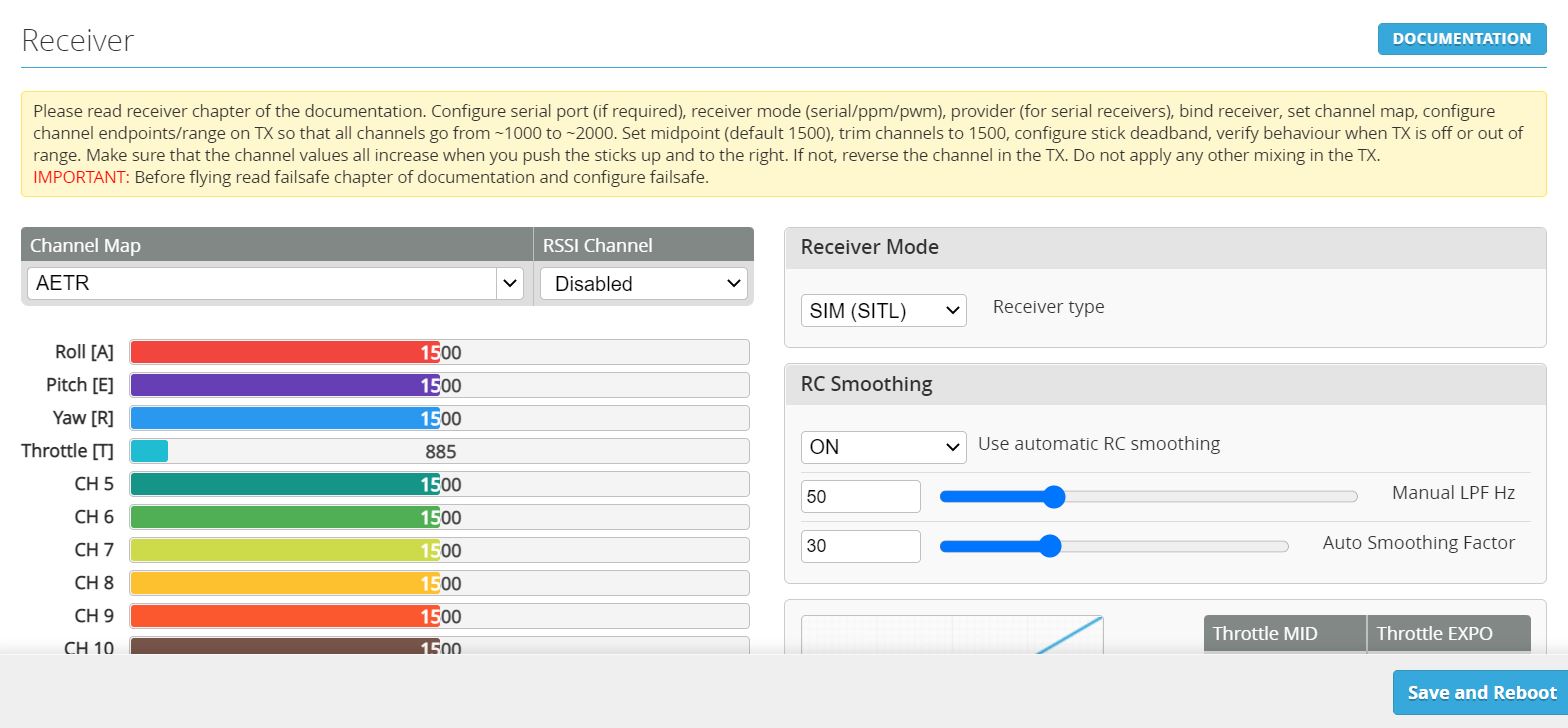
Here are also my ports and receiver configuration tabs:
To communicate with the inav_SITL with my script I've created this fork of pyMultiWii library. It uses TCP socket instead of serial to connect to inav_SITL and send MSP commands. I'm able to successfully connect to inav_SITL on port 5761 and retrieve any data like attitude or RC data, e.g.:
Has anyone faced a similar issue or can provide guidance on what might be going wrong?
Any help or insight much appreciated!
Beta Was this translation helpful? Give feedback.
All reactions