3DMatch is a ConvNet-based local geometric feature descriptor that operates on 3D data (i.e. point clouds, depth maps, meshes, etc.). This toolbox provides code to use 3DMatch for geometric registration and keypoint matching, as well as code to train 3DMatch from existing RGB-D reconstructions. This is the reference implementation of our paper:
PDF | Webpage & Benchmarks & Datasets | Video
Andy Zeng, Shuran Song, Matthias Nießner, Matthew Fisher, Jianxiong Xiao, and Thomas Funkhouser
IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2017 Oral Presentation
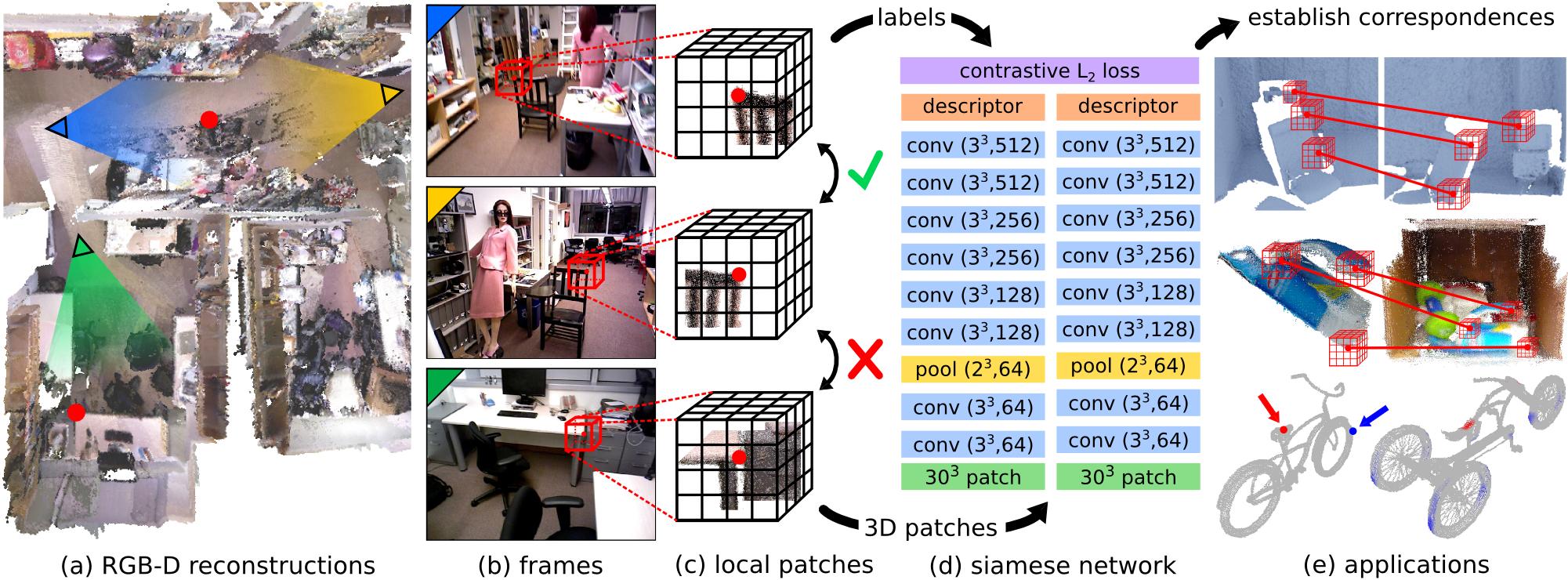
Matching local geometric features on real-world depth images is a challenging task due to the noisy, low-resolution, and incomplete nature of 3D scan data. These difficulties limit the performance of current state-of-art methods, which are typically based on histograms over geometric properties. In this paper, we present 3DMatch, a data-driven model that learns a local volumetric patch descriptor for establishing correspondences between partial 3D data. To amass training data for our model, we propose an unsupervised feature learning method that leverages the millions of correspondence labels found in existing RGB-D reconstructions. Experiments show that our descriptor is not only able to match local geometry in new scenes for reconstruction, but also generalize to different tasks and spatial scales (e.g. instance-level object model alignment for the Amazon Picking Challenge, and mesh surface correspondence). Results show that 3DMatch consistently outperforms other state-of-the-art approaches by a significant margin.
If you find this code useful in your work, please consider citing:
@inproceedings{zeng20163dmatch,
title={3DMatch: Learning Local Geometric Descriptors from RGB-D Reconstructions},
author={Zeng, Andy and Song, Shuran and Nie{\ss}ner, Matthias and Fisher, Matthew and Xiao, Jianxiong and Funkhouser, Thomas},
booktitle={CVPR},
year={2017}
}This code is released under the Simplified BSD License (refer to the LICENSE file for details).
All relevant information and downloads can be found here.
If you have any questions or find any bugs, please let me know: Andy Zeng andyz[at]princeton[dot]edu
- Mar. 20, 2018. Update: added labels for test-set of keypoint matching benchmark (for convenience).
- Nov. 02, 2017. Bug fix: added
#include <random>to utils.hpp in demo code. - Oct. 30, 2017. Bug fix: included Quoc-Huy's fix for NaN errors that occasionally occur during training.
- Oct. 28, 2017. Notice: demo code only reads 3D point clouds saved in a simple binary format. If you would like to run the 3DMatch demo code on your own point cloud format, please modify demo.cu accordingly.
- Apr. 06, 2017. Notice: 3DMatch uses cuDNN 5.1. Revised install instructions.
Our reference implementation of 3DMatch, as well as other components in this toolbox, require the following dependencies. Tested on Ubuntu 14.04.
-
CUDA 7.5 and cuDNN 5.1. You may need to register with NVIDIA. Below are some additional steps to set up cuDNN 5.1. NOTE We highly recommend that you install different versions of cuDNN to different directories (e.g.,
/usr/local/cudnn/vXX) because different software packages may require different versions.LIB_DIR=lib$([[ $(uname) == "Linux" ]] && echo 64) CUDNN_LIB_DIR=/usr/local/cudnn/v5.1/$LIB_DIR echo LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$CUDNN_LIB_DIR >> ~/.profile && ~/.profile tar zxvf cudnn*.tgz sudo cp cuda/$LIB_DIR/* $CUDNN_LIB_DIR/ sudo cp cuda/include/* /usr/local/cudnn/v5.1/include/
-
OpenCV (tested with OpenCV 2.4.11)
- Used for reading image files
- Matlab 2015b or higher (tested with Matlab 2016a)
- Demo: Align Two Point Clouds with 3DMatch
- Converting 3D Data to TDF Voxel Grids
- Training 3DMatch from RGB-D Reconstructions
- Multi-Frame Depth TSDF Fusion
- Evaluation Code

This demo aligns two 3D point clouds (projected from single-view depth maps) using our pre-trained 3DMatch descriptor (with Marvin) and standard RANSAC.
-
Checkout 3DMatch toolbox, compile C++/CUDA demo code and Marvin
git clone https://github.com/andyzeng/3dmatch-toolbox.git 3dmatch-toolbox cd 3dmatch-toolbox/core ./compile.sh -
Download our 3DMatch pre-trained weights
./download-weights.sh # 3dmatch-weights-snapshot-137000.marvin -
Load the two example 3D point clouds, compute their TDF voxel grid volumes, and compute random surface keypoints and their 3DMatch descriptors (saved to binary files on disk). Warning: this demo only reads 3D point clouds saved in a simple binary format. If you would like to run the 3DMatch demo code on your own point cloud format, please modify demo.cu accordingly.
# Generate fragment-1.desc.3dmatch.bin and fragment-1.keypts.bin ./demo ../data/sample/3dmatch-demo/single-depth-1.ply fragment-1 # Generate fragment-2.desc.3dmatch.bin and fragment-2.keypts.bin ./demo ../data/sample/3dmatch-demo/single-depth-2.ply fragment-2
-
Run the following script in Matlab:
% Load keypoints and 3DMatch descriptors and use RANSAC to register the two % point clouds. A visualization of the aligned point clouds is saved into % the file `result.ply` which can be viewed with Meshlab or any other 3D % viewer. Note: there is a chance that alignment may fail on the first try % of this demo due to bad keypoints, which are selected randomly by default. demo;
Instructions on how to convert from various 3D data representations into a voxel grid of Truncated Distance Function (TDF) values.
- Point cloud to TDF voxel grid (using nearest neighbor point distances)
- See C++/CUDA demo code (ComputeTDF) which approximates TDF values (fast) using an occupancy voxel grid.
- Alternative: See Matlab/CUDA code which computes accurate TDF values but is very slow.
- Alternative: See Matlab code which also computes accurate TDF values, but works standalone on Matlab. Usually runs without memory problems if your point cloud is small.
- Mesh to TDF voxel grid (using distance transform of mesh surface with GAPS). Note that a version of GAPS is already included in this repository.
-
Instructions on installing GAPS and converting a sample mesh (.off file) into a voxel grid (binary .raw file of floats):
cd 3dmatch-toolbox/gaps # Install GAPS make # Run msh2df on example mesh file (see comments in msh2df.cpp for more instructions) cd bin/x86_64 wget http://vision.princeton.edu/projects/2016/3DMatch/downloads/gaps/bicycle000002.off ./msh2df bicycle000002.off bicycle000002.raw -v # see comments in msh2df.cpp for more arguments # Download visualization script wget http://vision.princeton.edu/projects/2016/3DMatch/downloads/gaps/showTDF.m
-
Run the visualization script in Matlab
% Visualize TDF voxel grid of mesh showTDF;
- Depth map to TDF voxel grid
- Project depth map into a point cloud in 3D camera space and convert from point cloud to TDF voxel grid (see above)
- Alternative: Convert from depth map(s) into a TSDF volume (see instructions here) and compute the absolute value of each voxel (aka. projective TDF values, which behave differently near the view boundaries and regions of missing depth)
See folder 3dmatch-toolbox/training
Code for training 3DMatch with Marvin, a lightweight GPU-only neural network framework. Includes Siamese network architecture .json file training/net.json and a CUDA/C++ Marvin data layer in training/match.hpp that randomly samples correspondences from RGB-D reconstruction datasets (which can be downloaded from our project webpage).
-
Compile Marvin
cd 3dmatch-toolbox/training ./compile.sh -
Download several training and testing scenes from RGB-D reconstruction datasets (download more scenes here)
cd ../data mkdir train && mkdir test && mkdir backup cd train wget http://vision.princeton.edu/projects/2016/3DMatch/downloads/rgbd-datasets/sun3d-brown_cogsci_1-brown_cogsci_1.zip wget http://vision.princeton.edu/projects/2016/3DMatch/downloads/rgbd-datasets/7-scenes-heads.zip wget http://vision.princeton.edu/projects/2016/3DMatch/downloads/rgbd-datasets/sun3d-harvard_c11-hv_c11_2.zip unzip sun3d-brown_cogsci_1-brown_cogsci_1.zip unzip 7-scenes-heads.zip unzip sun3d-harvard_c11-hv_c11_2.zip mv *.zip ../backup cd ../test wget http://vision.princeton.edu/projects/2016/3DMatch/downloads/rgbd-datasets/sun3d-hotel_umd-maryland_hotel3.zip unzip sun3d-hotel_umd-maryland_hotel3.zip mv *.zip ../backup cd ../../training
-
Train a 3DMatch model from scratch over correspondences from the RGB-D scenes saved in
data/train./marvin train net.json
-
(Optional) Train 3DMatch using pre-trained weights from a Marvin tensor file
./marvin train net.json your-pre-trained-weights.marvin
You can download more scenes from RGB-D reconstruction datasets on our project webpage. These datasets have been converted into a unified format, which is compatible with our Marvin data layer used to train 3DMatch. Save at least one scene into data/train and another scene into data/test such that the folder hierarchy looks something like this:
|——— training
|——— core
|——— marvin.hpp
|——— ...
|——— data
|——— train
|——— rgbd-dataset-scene-1
|——— seq-01
|——— seq-02
|——— camera-intrinsics.txt
|——— ...
|——— ...
|——— test
|——— rgbd-dataset-scene-2
|——— seq-01
|——— camera-intrinsics.txt
|——— ...See folder 3dmatch-toolbox/depth-fusion
CUDA/C++ code to fuse multiple registered depth maps into a TSDF voxel volume (Curless and Levoy 1996), which can then be used to create surface meshes and point clouds.
This demo fuses 50 registered depth maps from directory data/sample/depth-fusion-demo/rgbd-frames into a TSDF voxel volume, and creates a surface point cloud tsdf.ply
cd 3dmatch-toolbox/depth-fusion
./compile.sh
./demo # output saved to tsdf.plySee folder 3dmatch-toolbox/evaluation
Evaluation code for the Keypoint Matching Benchmark and Geometric Registration Benchmark, as well as a reference implementation for the experiments in our paper.
See folder 3dmatch-toolbox/evaluation/keypoint-matching
Benchmark description and leaderboard can be found here.
-
Navigate to
3dmatch-toolbox/evaluation/keypoint-matchingand run the following in Matlab:% Evaluate 3DMatch (3dmatch.log) on the validation set (validation-set-gt.log) getError;
-
Compile C++/CUDA code to compute 3DMatch descriptors with Marvin
cd 3dmatch-toolbox/evaluation/keypoint-matching ./compile.sh -
Download our 3DMatch pre-trained weights
./download-weights.sh # 3dmatch-weights-snapshot-137000.marvin -
Download the validation set and test set
./download-validation.sh # validation-set.mat ./download-test.sh # test-set.mat
-
Modify and run the following script in Matlab:
% Runs 3DMatch on the validation set and generates 3dmatch.log test3DMatch;
Generate your own correspondence dataset from RGB-D reconstructions
-
Download one or more scenes from RGB-D reconstruction datasets on our project webpage. Organize the folder hierarchy as above.
-
Modify and run the following script in Matlab:
makeCorresDataset;
See folder 3dmatch-toolbox/evaluation/geometric-registration
Includes Matlab code to run evaluation on the geometric registration benchmarks described here. Overview:
getKeyptsAndDesc.m- generates intermediate data (TDF voxel volumes, keypoints, and 3DMatch descriptors) for the scene fragments. You can also download our pre-computed data here.runFragmentRegistration.m- read intermediate data and run RANSAC-based registration for every pair of fragments.writeLog- read registration results from every pair of fragments and create a .log fileevaluate.m- compute precision and recall from .log files for evaluation
Run the following in Matlab:
% Evaluate 3DMatch on the geometric registration benchmark
evaluate;Note: the TDF voxel grids of the scene fragments from the synthetic benchmark were computed using the deprecated code for accurate TDF (see deprecated/pointCloud2AccTDF.m). 3DMatch pre-trained weights fine-tuned on training fragments can be downloaded here.
See folder 3dmatch-toolbox/evaluation/model-fitting-apc
Includes code and pre-trained models to evaluate 3DMatch for model fitting on the Shelf & Tote dataset. You can download our pre-computed data (TDF voxel grid volumes for objects and scans, surface keypoints, descriptors, and pose predictions) here. For an evaluation example, run Matlab script getError.m
See folder 3dmatch-toolbox/evaluation/mesh-correspondence-shape2pose
Includes code to generate mesh correspondence visualizations on the meshes from the Shape2Pose dataset using 3DMatch. You can also download our pre-computed data (TDF voxel grid volumes of the meshes, surface keypoints, 3DMatch descriptors) here. For a quick visualization, run the Matlab script keypointRetrieval.m.