TencentOS tiny目前主要支持ARM Cortex M核芯片的移植,比如STM32 基于Cortex M核全系列、NXP 基于Cortex M核全系列等。本教程将使用STM32官方Demo开发板 NUCLEO-L073RZ进行示例移植,其他 ARM Cortex M系列开发板和芯片移植方法类似。
调试ARM Cortex M核还需要仿真器, NUCLEO-L073RZ自带ST-Link调试器,如果您的开发板或者芯片模组没有板载仿真器,就需要连接外置的仿真器,如J-Link、U-Link之类的。
本移植指南针对的是GCC编译器,所以我们移植内核前需要先安装GCC编译器,能编译ARM Cortex M核的GCC编译器下载地址为:https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-rm/downloads
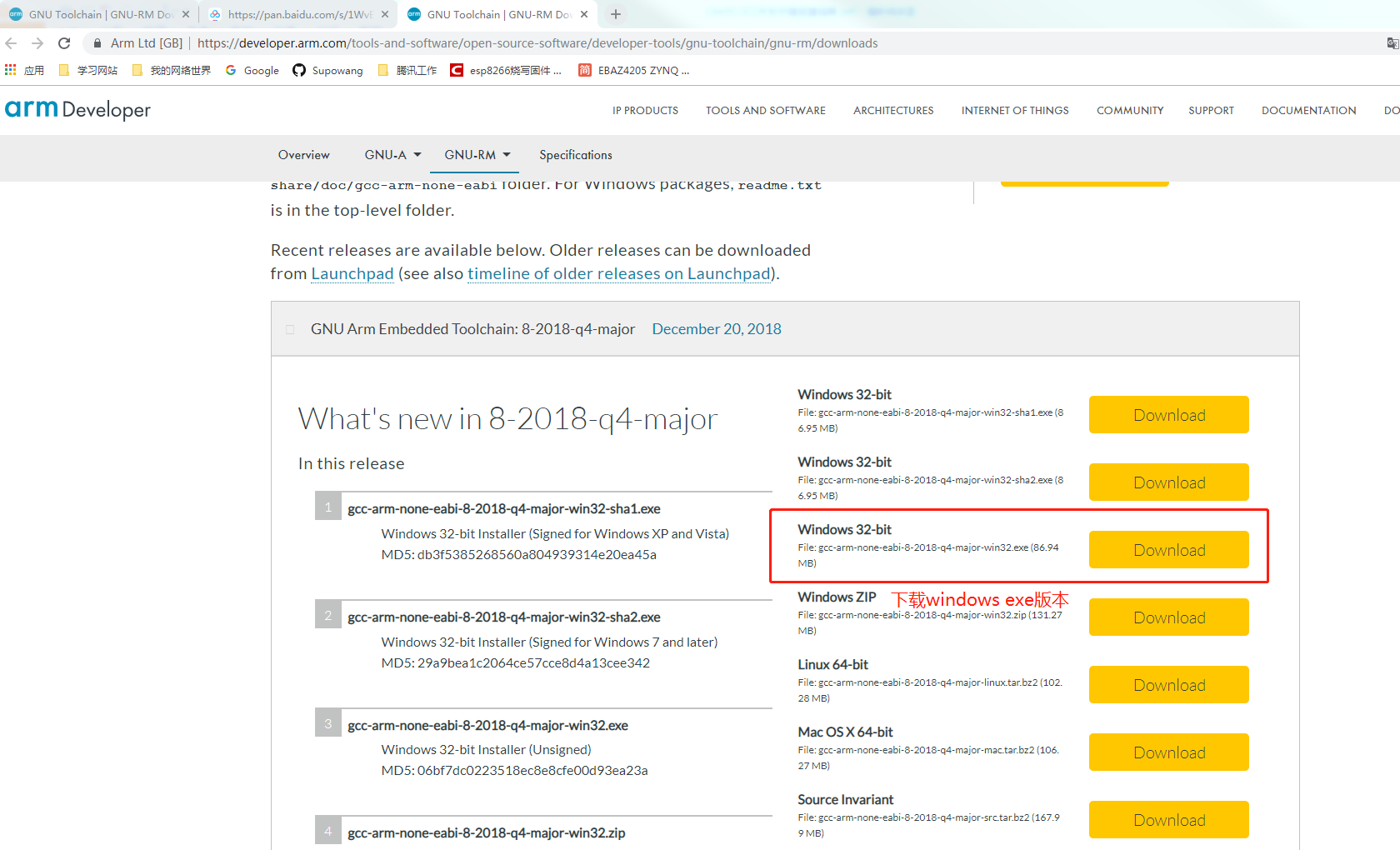
如上图所示,下载windows exe版本的gcc编译器(Linux下也可以下载linux版本的编译器),下载完成在windows环境下按照提示安装,如下图,
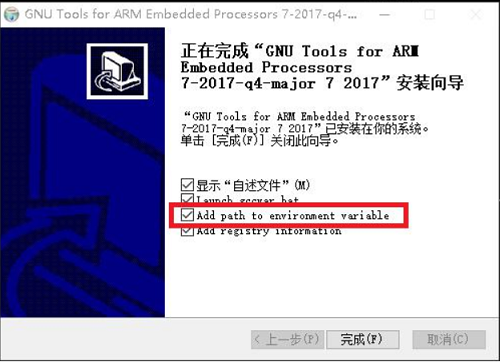
注意:安装完毕后需要将“Add path to environment variable”勾选上。
由于windows环境下没有make环境,所以我们还需要安装一个make工具,Make 工具用于 build 工程, 使用 Makefile 编译工程。 版本:gnu-mcu-eclipse-build-tools-2.9-20170629-1013-win64-setup.exe
下载地址:https://github.com/gnu-mcu-eclipse/windows-build-tools/releases/tag/v2.9-20170629-1013 直接双击安装,完成后将安装后的make命令目录添加到windows的path环境变量中,默认安装目录为: C:\Program Files\GNU MCU Eclipse\Build Tools\2.9-20170629-1013\bin\bin,在环境变量中添加安装目录即可。
移植TencentOS tiny基础内核需要您提前准备一个芯片对应的裸机工程,裸机工程包含基本的芯片启动文件、基础配置(时钟、主频等)、以及串口、基本GPIO驱动用于RTOS测试。
本教程使用ST官方的STM32CubeMX软件来自动化生成GCC裸机工程,STM32CubeMX的下载地址为:
安装STM32CubeMx还需要事先安装好JDK环境,您可以在互联网上查找如何安装和配置JDK环境,此处不再赘述。
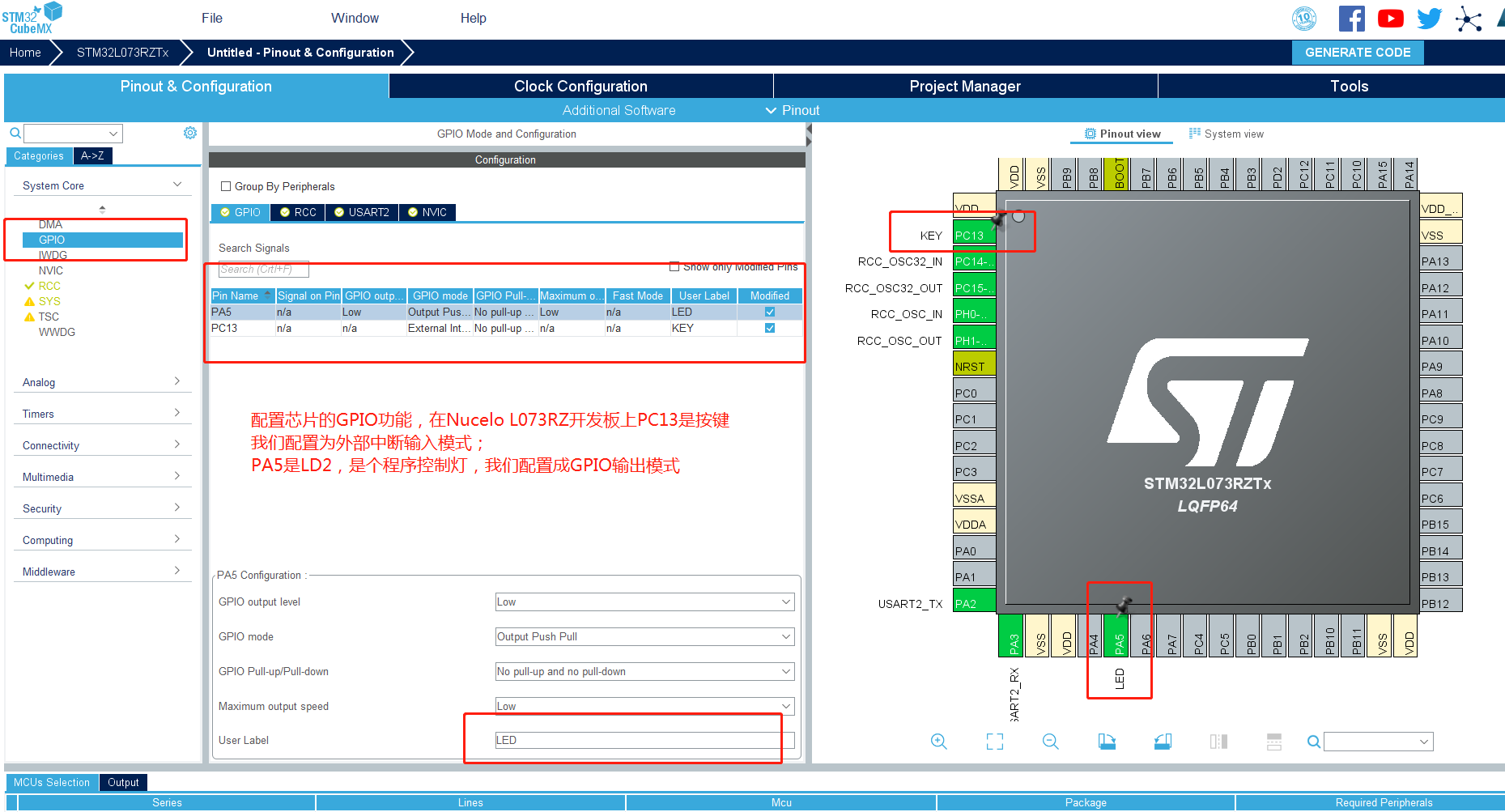
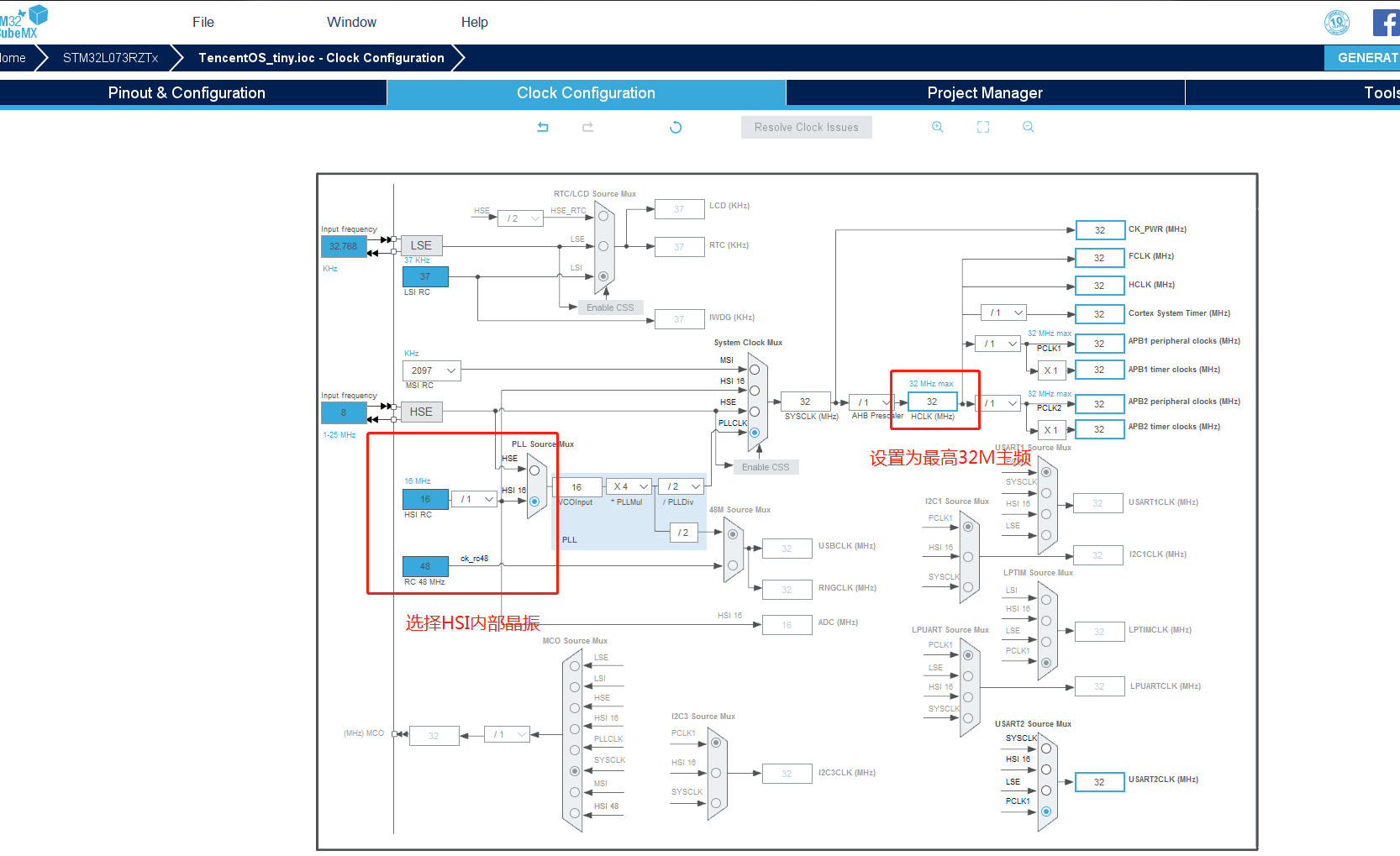
CubeMX安装完成后,我们就可以使用CubeMX来给NUCLEO-L073RZ开发板生成裸机工程了,如果您的芯片不是STM32,而是其他厂商的ARM Cortex M系列,您可以根据产商的指导准备裸机工程,后续的内核移植步骤是一致的。
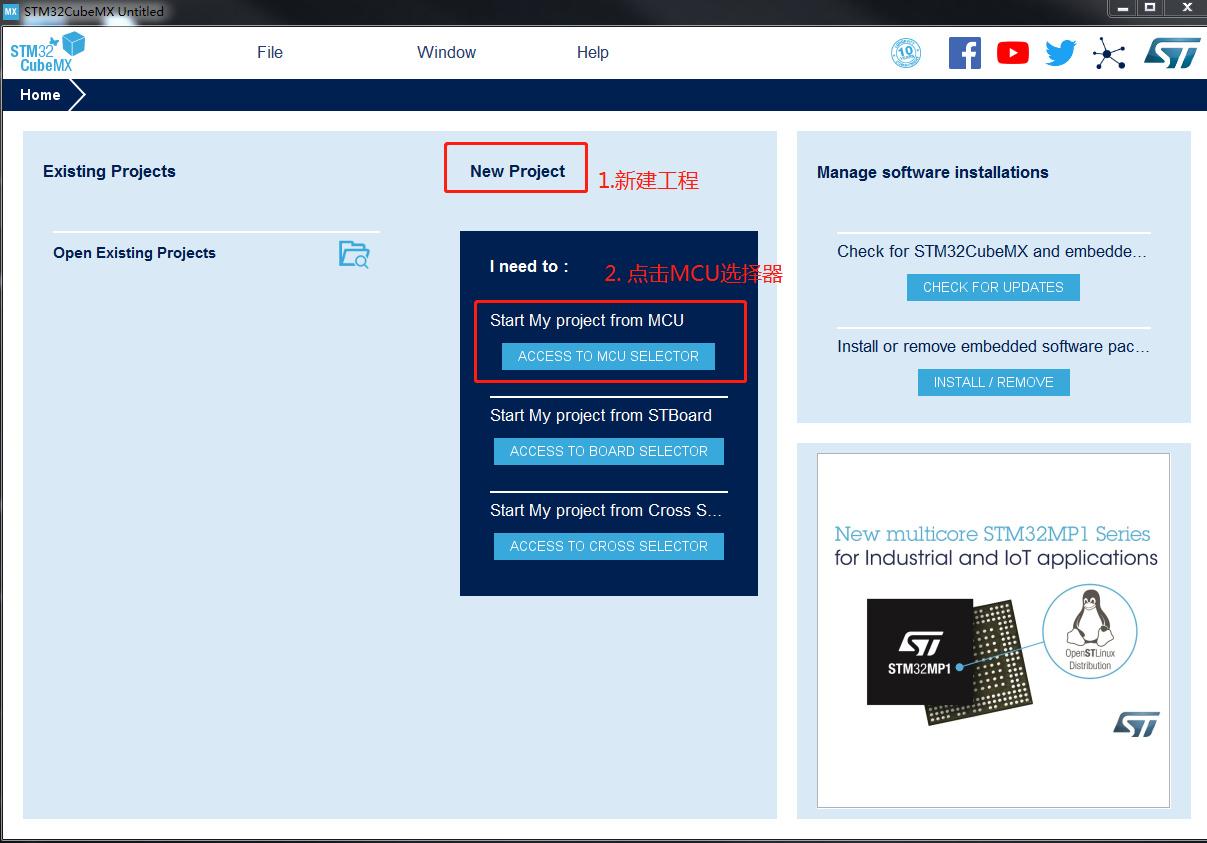
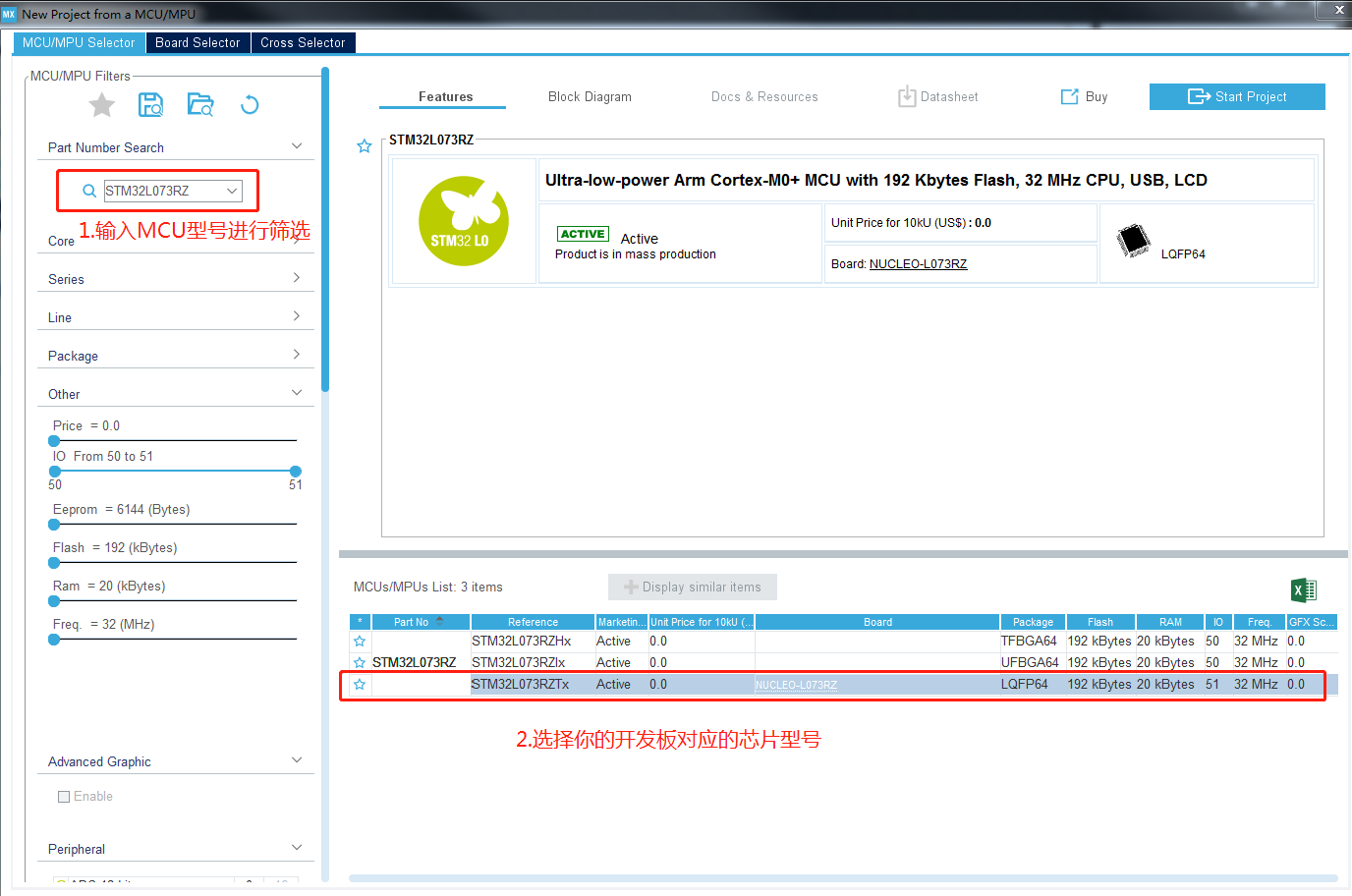
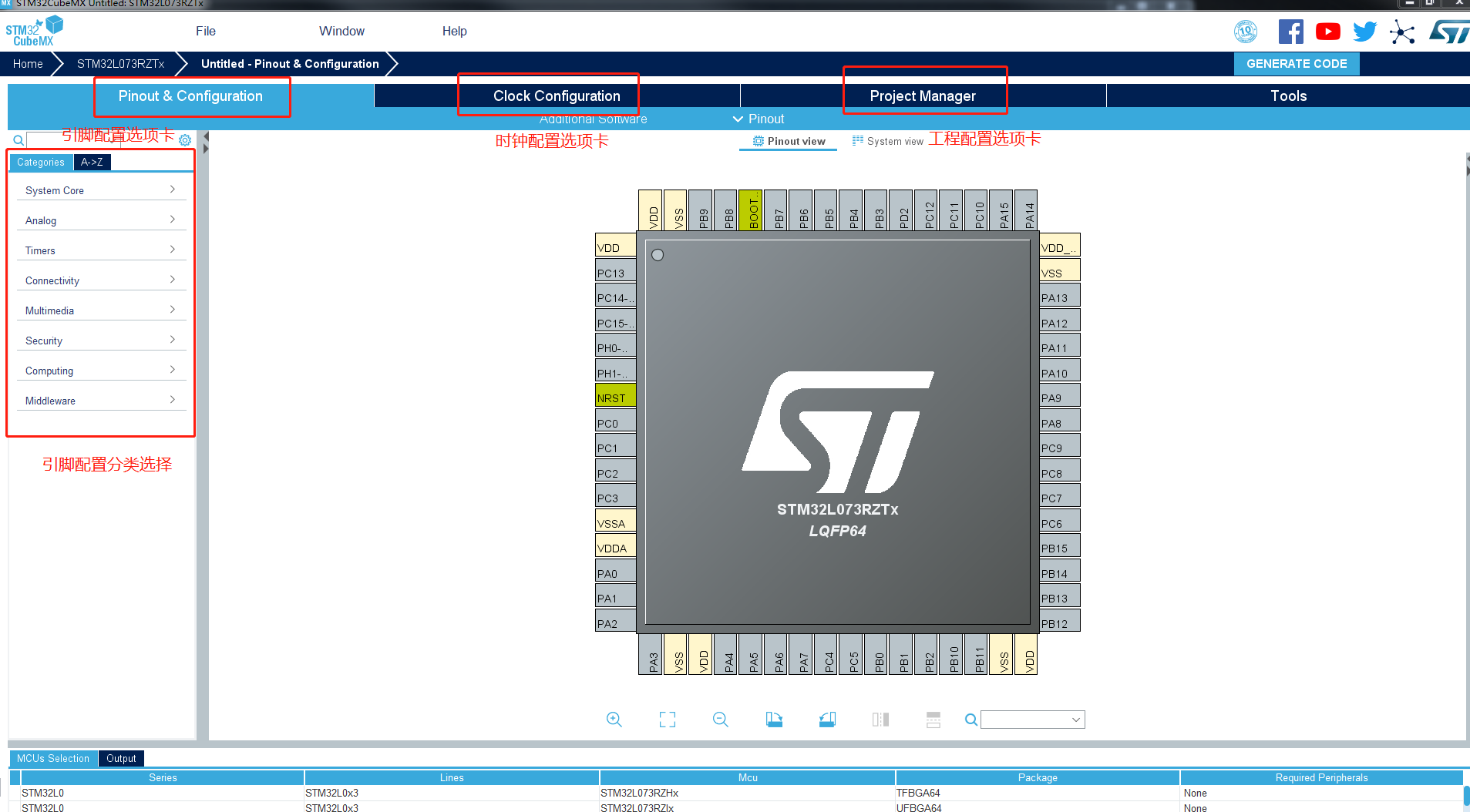
如上图所示:通过MCU筛选来找到自己开发板对应的芯片型号,双击后弹出工程配置界面,如下图:
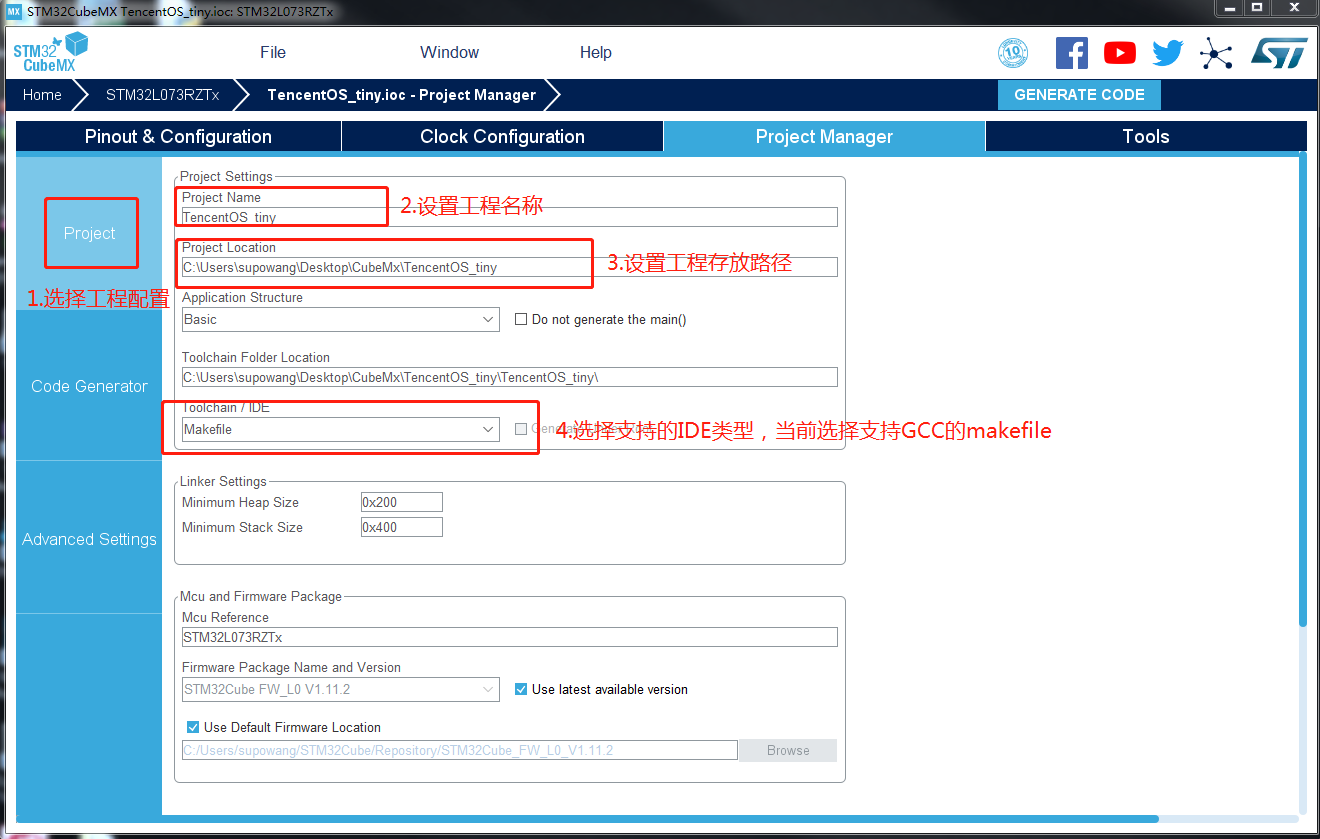
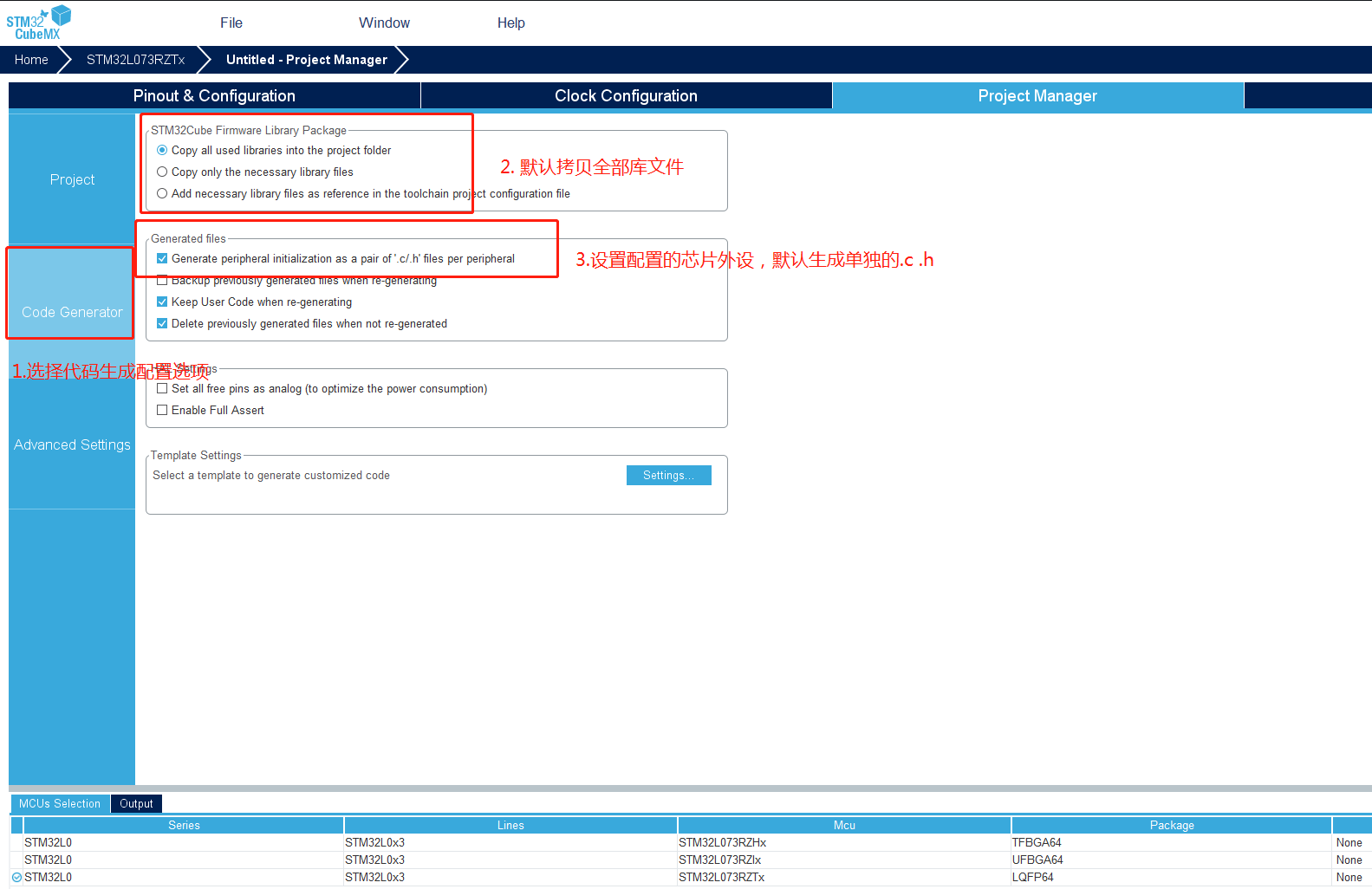
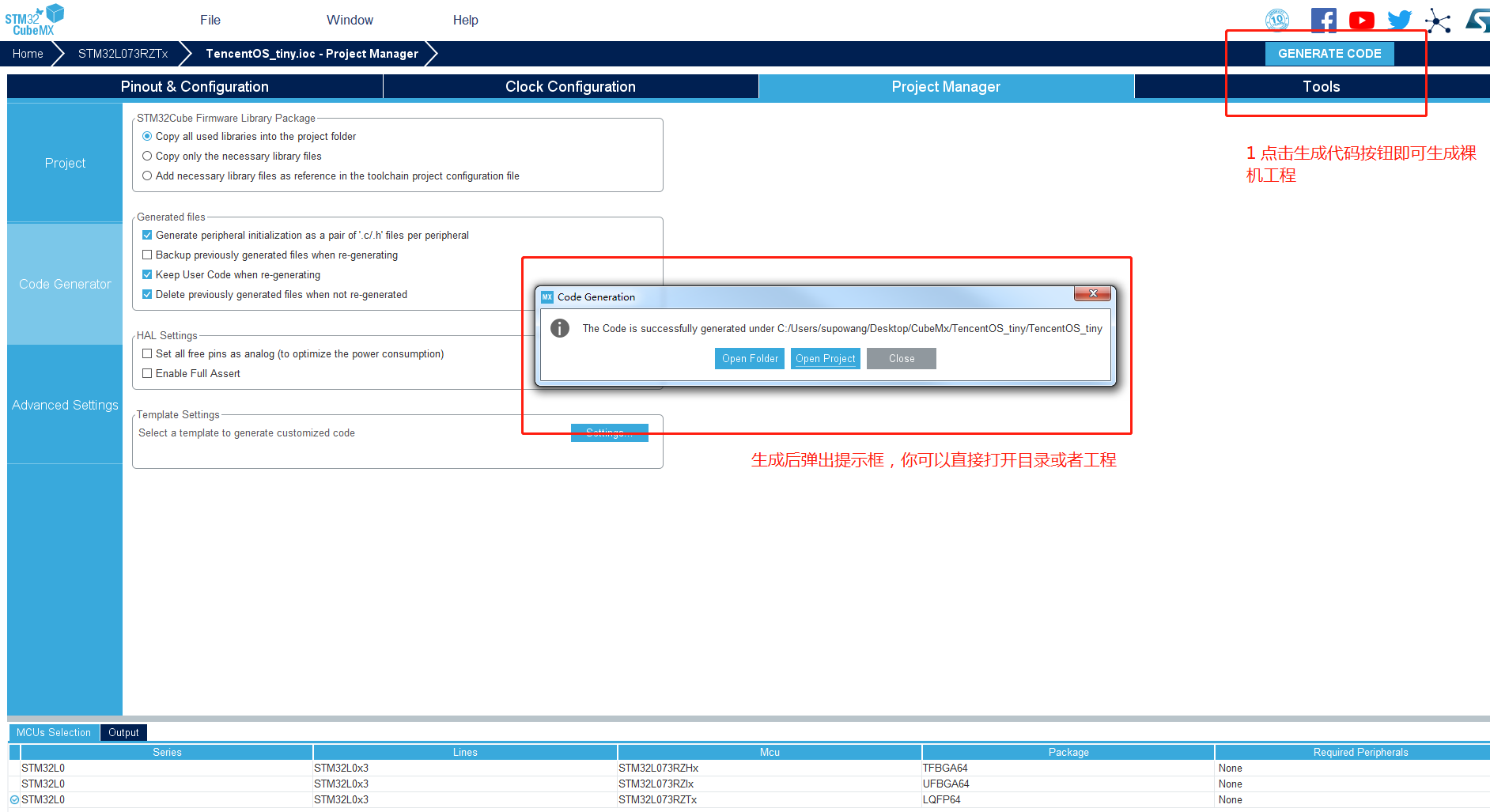
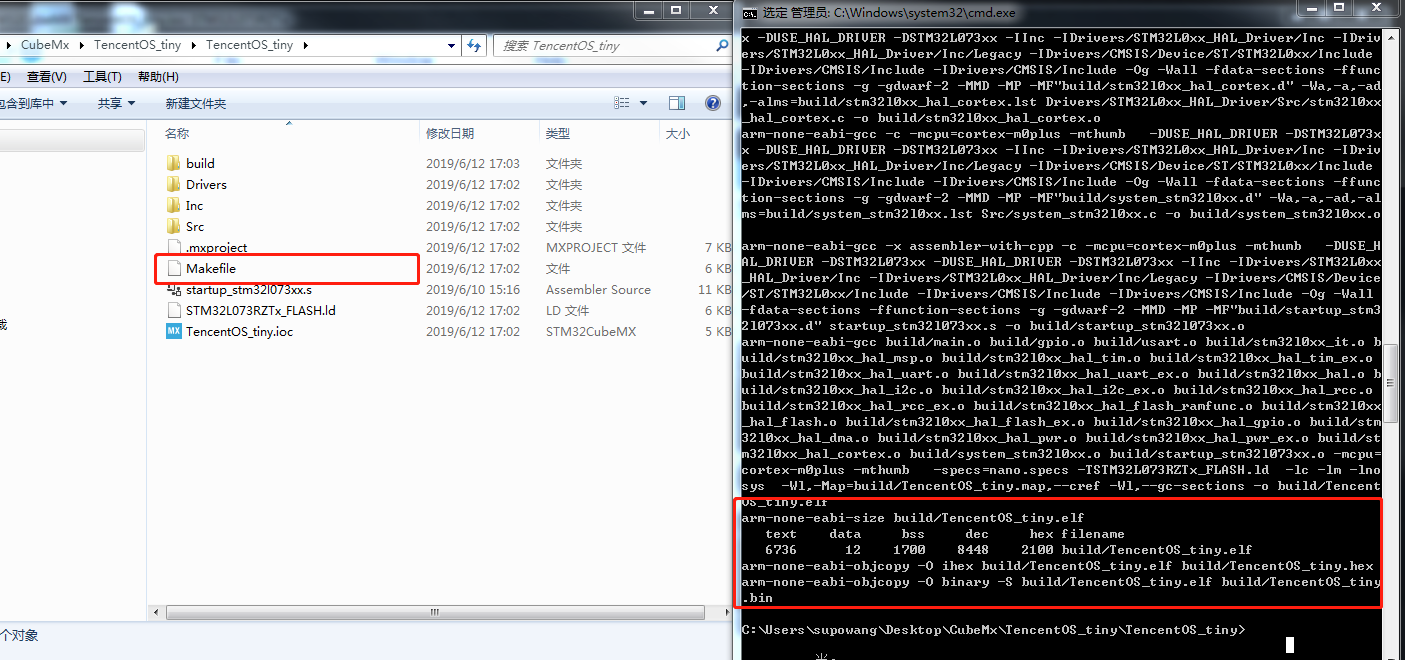
点击生成代码后,生成的裸机工程效果如下,在makefile同级目录下打开windows的cmd命令窗口(目录下按shift+鼠标右键,点击在此处打开命令窗口),输入make命令,就可以编译gcc裸机工程了,编译完成后,可以看到生成了elf和bin文件,通过工具就可以下载bin文件到开发板运行了。
TencentOS tiny的源码已经开源,github下载地址为:
https://github.com/Tencent/TencentOS-tiny.git
| 一级目录 | 二级目录 | 说明 |
|---|---|---|
| arch | arm | TencentOS tiny适配的IP核架构(含M核中断、调度、tick相关代码) |
| board | NUCLEO_L073RZ | 移植目标芯片的工程文件 |
| kernel | core | TencentOS tiny内核源码 |
| pm | TencentOS tiny低功耗模块源码 | |
| osal | cmsis_os | TencentOS tiny提供的cmsis os 适配 |
由于本教程只介绍TencentOS tiny的内核移植,所以这里只需要用到 arch、board、kernel、osal四个目录下的源码。
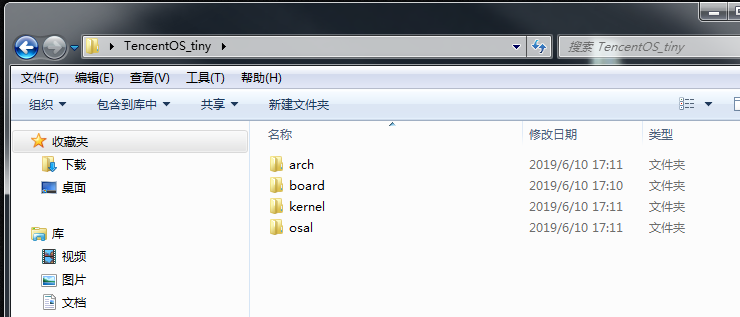
如图所示,新建TencentOS_tiny主目录,并在主目录下添加四个子目录,其中arch、kernel、osal从代码仓直接拷贝过来即可,而board目录下则放入我们前面生成的裸机工程代码,我们移植的开发板取名叫NUCLEO_L073RZ,裸机代码全部拷贝到下面即可,如下图所示:
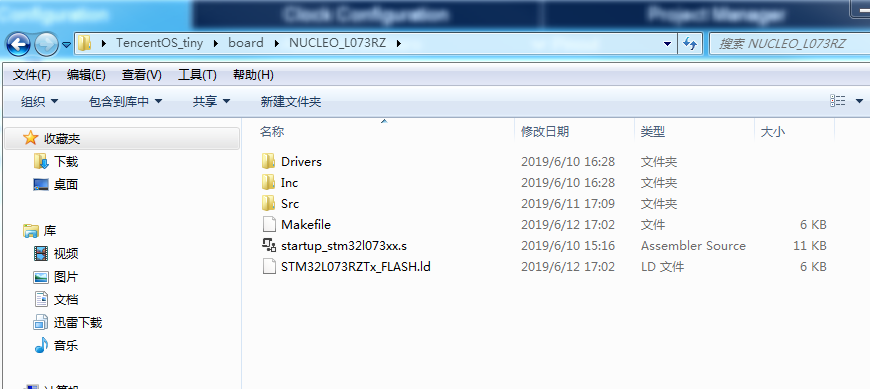
接下来进入TencentOS_tiny\board\NUCLEO_L073RZ目录,打开Makefile,我们开始添加TencentOS tiny的内核代码。
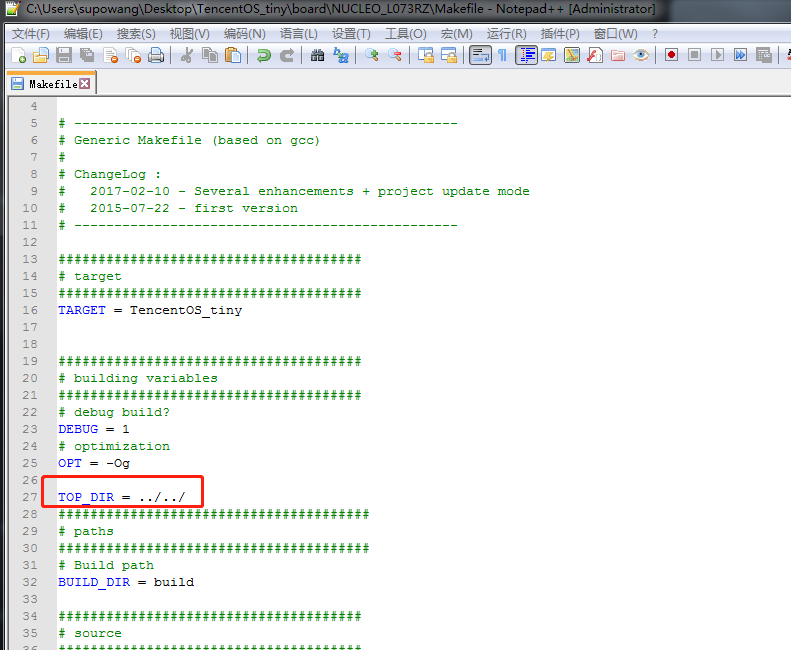
添加代码前先在makefile文件下定义一个TOP_DIR路径,作为TencentOS tiny的顶级目录,当前makefile文件在二级子目录下面,我们可以定义相对顶级目录为TOP_DIR = ../../,如下图所示:
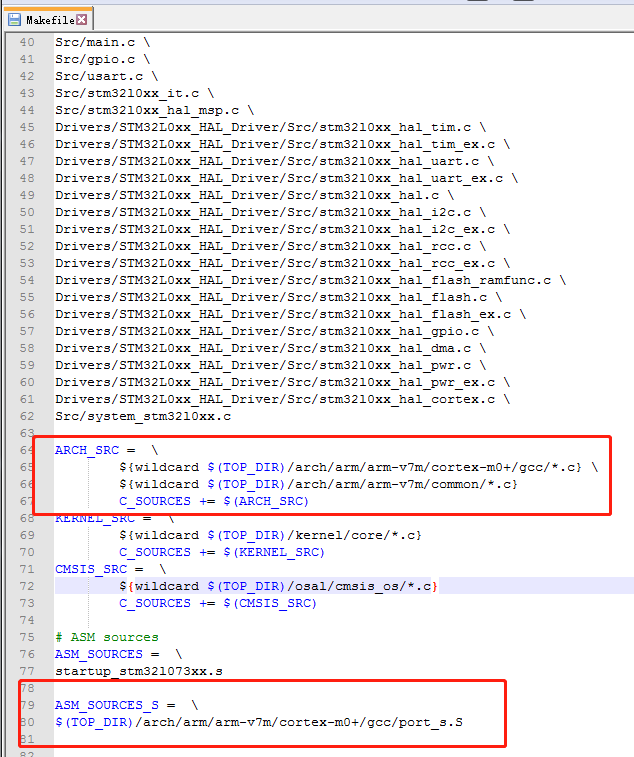
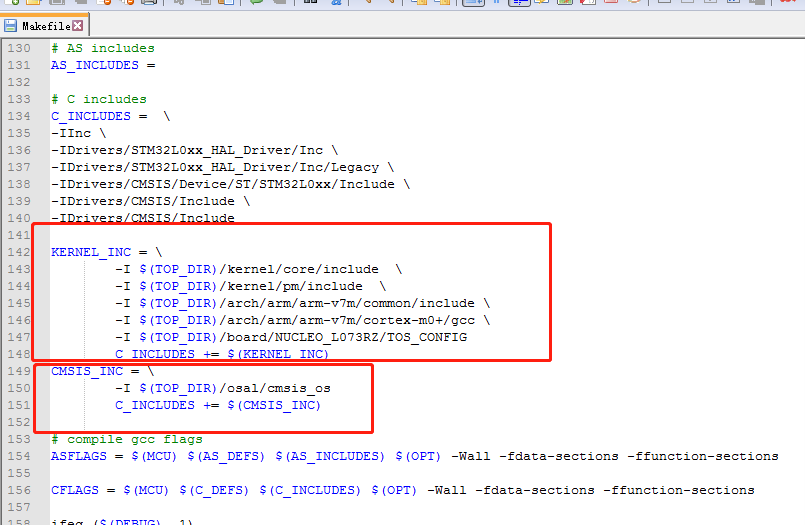
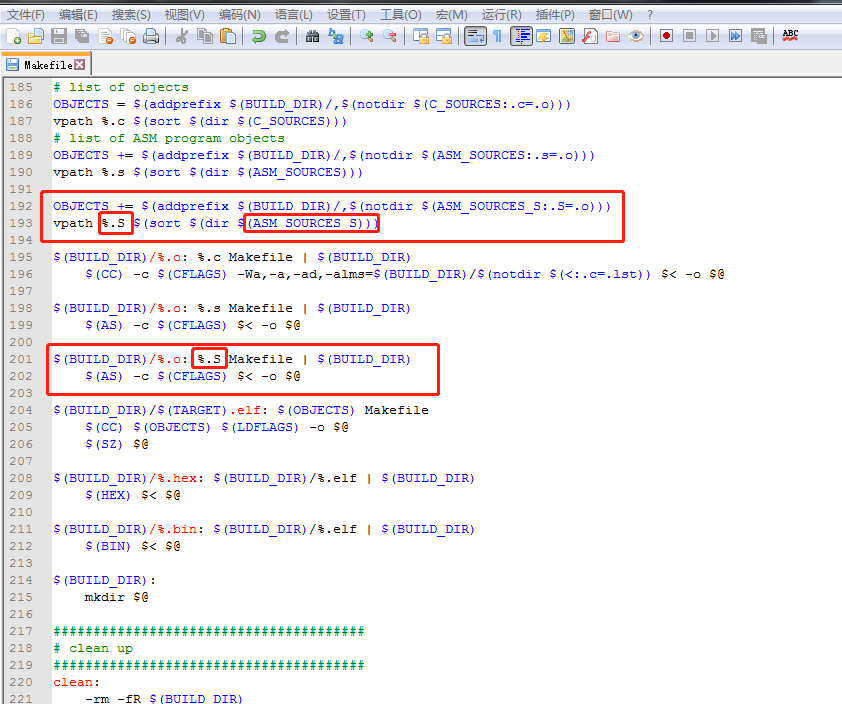
然后在makefile中 C_SOURCES后面添加 arch C代码,在ASM_SOURCES后面添加一个ASM_SOURCES_S 分组,加入调度汇编代码.S.
tos_cpu.c是TencentOS tiny 的CPU适配文件,包括堆栈初始化,中断适配等,如果您的芯片是ARM Cortex M核,该文件可以不做改动,M0、M3 、M4、M7是通用的,其他IP核需要重新适配;
port_s.S 文件是TencentOS tiny的任务调度汇编代码,主要做弹栈压栈等处理的,port_c.c适配systick等,这两个文件 每个IP核和编译器都是不一样的,如果您的芯片是ARM Cortex M核,我们都已经适配好,比如现在我们移植的芯片是STM32L073RZ,是ARM Cortex M0+核,使用的编译器是GCC,所以我们选择arch\arm\arm-v7m\cortex-m0+\gcc下的适配代码,如果你的开发板是STM32F429IG,M4核,编译器是keil,则可以选择arch\arm\arm-v7m\cortex-m4\armcc目录下的适配文件。
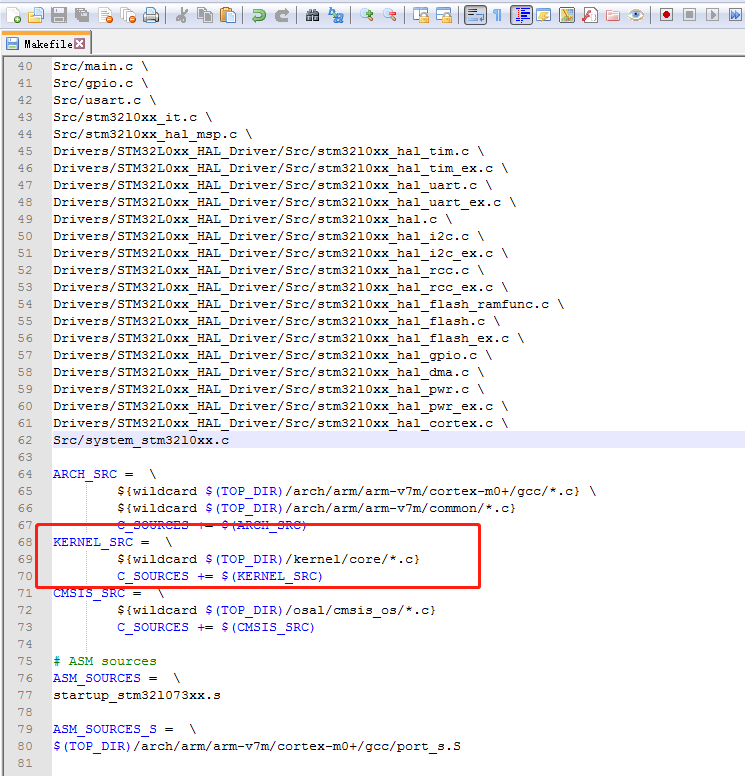
内核源码kerne目录下包含core和pm两个目录,其中core下为基础内核,pm是内核中的低功耗组件;基础移植的时候可以不添加pm目录下的代码,如下图所示,添加基本内核源码:
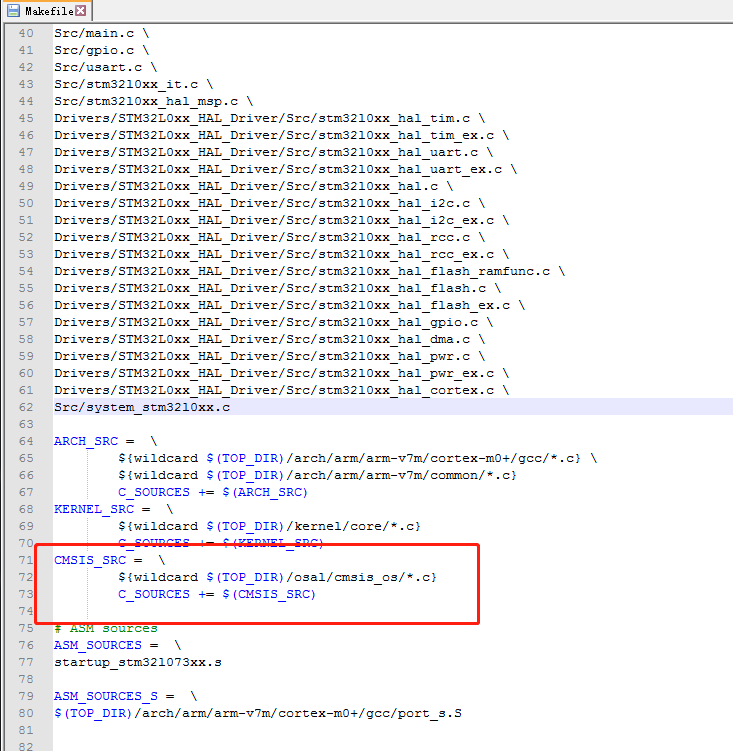
cmsis os是TencentOS tiny为了兼容cmsis标准而适配的OS抽象层,可以简化大家将业务从其他RTOS迁移到TencentOS tiny的工作量。
添加头文件目录前,我们在要移植的工程目录下新增一个 TOS_CONFIG文件夹,用于存放TencentOS tiny的配置头文件,也就是接下来要新建的tos_config.h文件;
TencentOS tiny所有要添加的头文件目录如下:
由于我们TencentOS tiny的调度汇编port_s.S文件用的后缀是.S 而不是.s,所以我们要在makefile中添加编译.S的规则,如下图所示:
#ifndef _TOS_CONFIG_H_
#define _TOS_CONFIG_H_
#include "stm32l0xx.h" // 目标芯片头文件,用户需要根据情况更改
#define TOS_CFG_TASK_PRIO_MAX 10u // 配置TencentOS tiny默认支持的最大优先级数量
#define TOS_CFG_ROUND_ROBIN_EN 0u // 配置TencentOS tiny的内核是否开启时间片轮转
#define TOS_CFG_OBJECT_VERIFY_EN 1u // 配置TencentOS tiny是否校验指针合法
#define TOS_CFG_TASK_DYNAMIC_CREATE_EN 1u // TencentOS tiny 动态任务创建功能宏
#define TOS_CFG_EVENT_EN 1u // TencentOS tiny 事件模块功能宏
#define TOS_CFG_MMBLK_EN 1u //配置TencentOS tiny是否开启内存块管理模块
#define TOS_CFG_MMHEAP_EN 1u //配置TencentOS tiny是否开启动态内存模块
#define TOS_CFG_MMHEAP_DEFAULT_POOL_EN 1u // TencentOS tiny 默认动态内存池功能宏
#define TOS_CFG_MMHEAP_DEFAULT_POOL_SIZE 0x100 // 配置TencentOS tiny默认动态内存池大小
#define TOS_CFG_MUTEX_EN 1u // 配置TencentOS tiny是否开启互斥锁模块
#define TOS_CFG_MESSAGE_QUEUE_EN 1u // 配置TencentOS tiny是否开启消息队列模块
#define TOS_CFG_MAIL_QUEUE_EN 1u // 配置TencentOS tiny是否开启消息邮箱模块
#define TOS_CFG_PRIORITY_MESSAGE_QUEUE_EN 1u // 配置TencentOS tiny是否开启优先级消息队列模块
#define TOS_CFG_PRIORITY_MAIL_QUEUE_EN 1u // 配置TencentOS tiny是否开启优先级消息邮箱模块
#define TOS_CFG_TIMER_EN 1u // 配置TencentOS tiny是否开启软件定时器模块
#define TOS_CFG_PWR_MGR_EN 0u // 配置TencentOS tiny是否开启外设电源管理模块
#define TOS_CFG_TICKLESS_EN 0u // 配置Tickless 低功耗模块开关
#define TOS_CFG_SEM_EN 1u // 配置TencentOS tiny是否开启信号量模块
#define TOS_CFG_TASK_STACK_DRAUGHT_DEPTH_DETACT_EN 1u // 配置TencentOS tiny是否开启任务栈深度检测
#define TOS_CFG_FAULT_BACKTRACE_EN 0u // 配置TencentOS tiny是否开启异常栈回溯功能
#define TOS_CFG_IDLE_TASK_STK_SIZE 128u // 配置TencentOS tiny空闲任务栈大小
#define TOS_CFG_CPU_TICK_PER_SECOND 1000u // 配置TencentOS tiny的tick频率
#define TOS_CFG_CPU_CLOCK (SystemCoreClock) // 配置TencentOS tiny CPU频率
#define TOS_CFG_TIMER_AS_PROC 1u // 配置是否将TIMER配置成函数模式
#endif
按照上面的模板配置好TencentOS tiny的各项功能后,将tos_config.h 文件放入要移植的board工程目录下即可,例如本教程是放到board\NUCLEO_L073RZ\TOS_CONFIG目录下。
这样,TencentOS tiny的源码就全部添加完毕了。
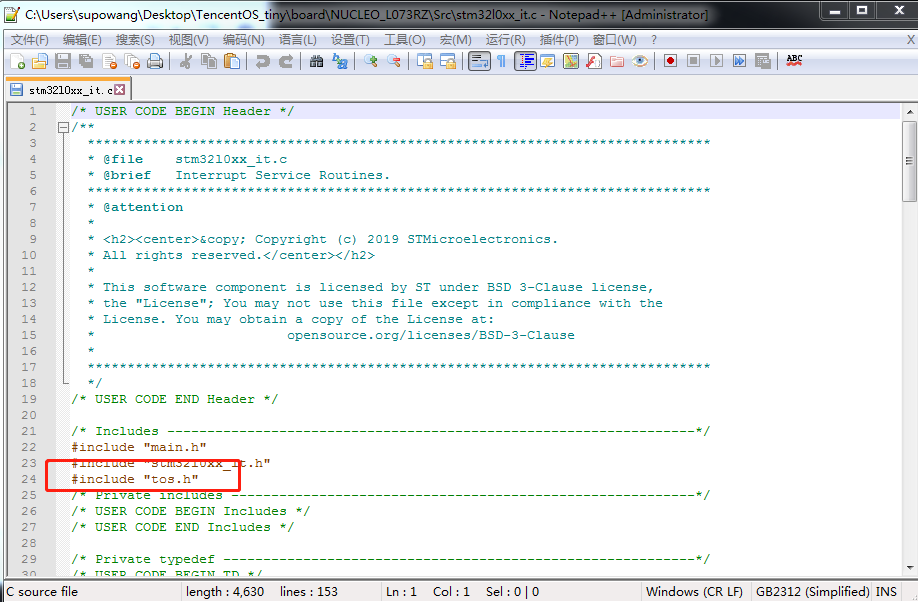
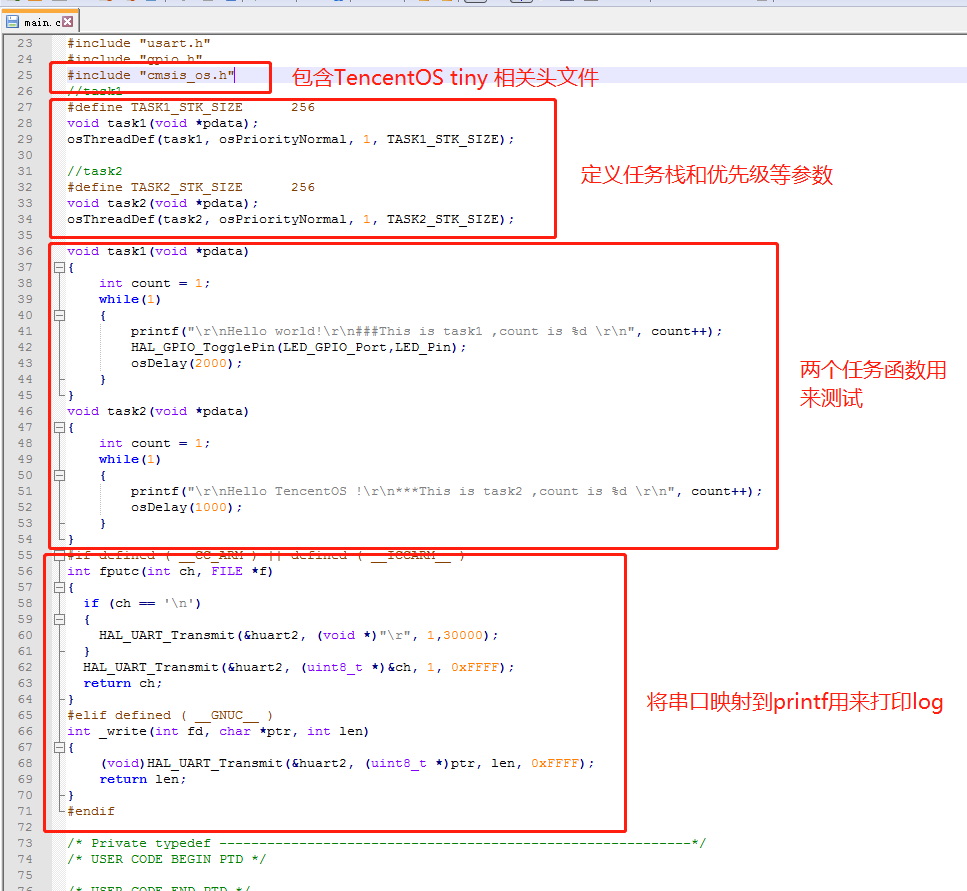
在stm32l0xx_it.c(board\NUCLEO_L073RZ\Src目录下)文件中包含 tos_k.h 头文件
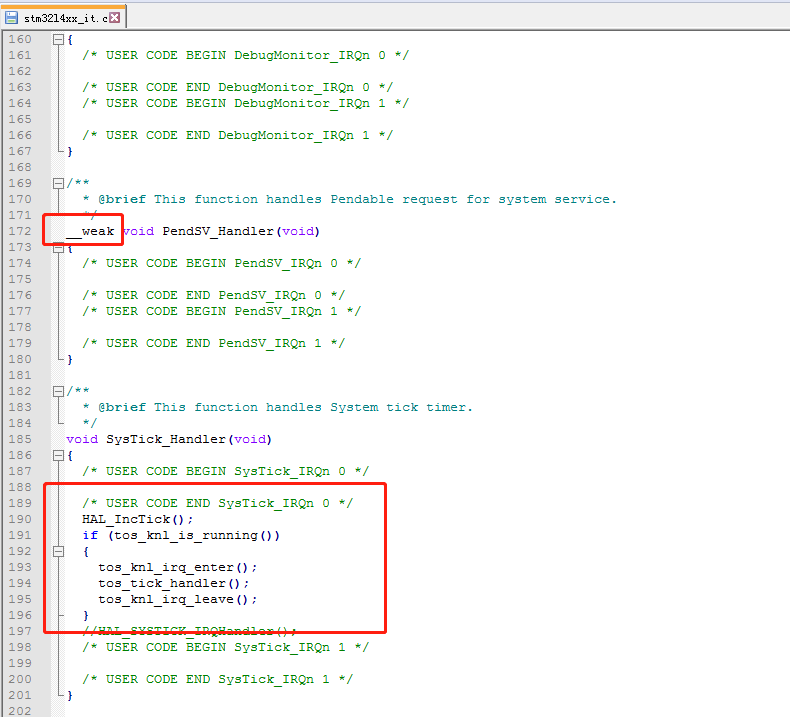
在stm32l0xx_it.c文件中的PendSV_Handler函数前添加__weak关键字,因为该函数在TencentOS tiny的调度汇编中已经重新实现;同时在SysTick_Handler函数中添加TencentOS tiny的调度处理函数,如下图所示:
#include "cmsis_os.h"
//task1
#define TASK1_STK_SIZE 512
void task1(void *pdata);
osThreadDef(task1, osPriorityNormal, 1, TASK1_STK_SIZE);
//task2
#define TASK2_STK_SIZE 512
void task2(void *pdata);
osThreadDef(task2, osPriorityNormal, 1, TASK2_STK_SIZE);
void task1(void *pdata)
{
int count = 1;
while(1)
{
printf("\r\nHello world!\r\n###This is task1 ,count is %d \r\n", count++);
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
osDelay(2000);
}
}
void task2(void *pdata)
{
int count = 1;
while(1)
{
printf("\r\nHello TencentOS !\r\n***This is task2 ,count is %d \r\n", count++);
osDelay(1000);
}
}
int _write(int fd, char *ptr, int len)
{
(void)HAL_UART_Transmit(&huart2, (uint8_t *)ptr, len, 0xFFFF);
return len;
}
如图:
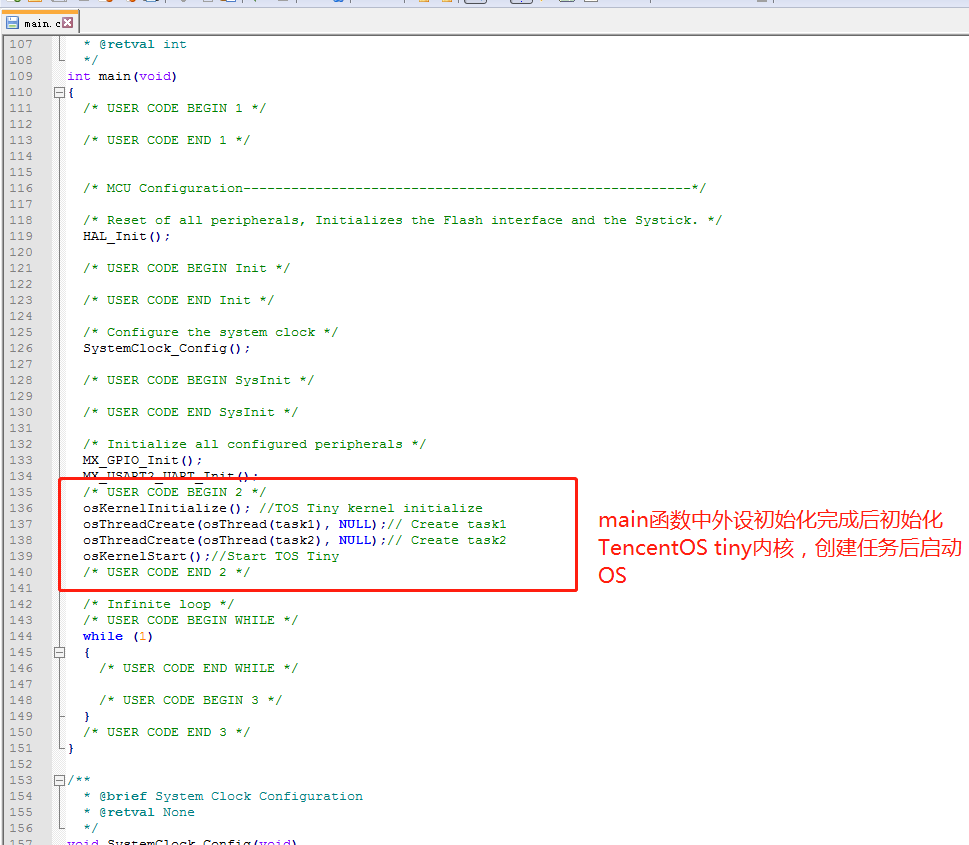
继续在main.c 的mian函数中硬件外设初始化代码后添加TencentOS tiny的初始化代码:
osKernelInitialize(); //TOS Tiny kernel initialize
osThreadCreate(osThread(task1), NULL);// Create task1
osThreadCreate(osThread(task2), NULL);// Create task2
osKernelStart();//Start TOS Tiny
如图:
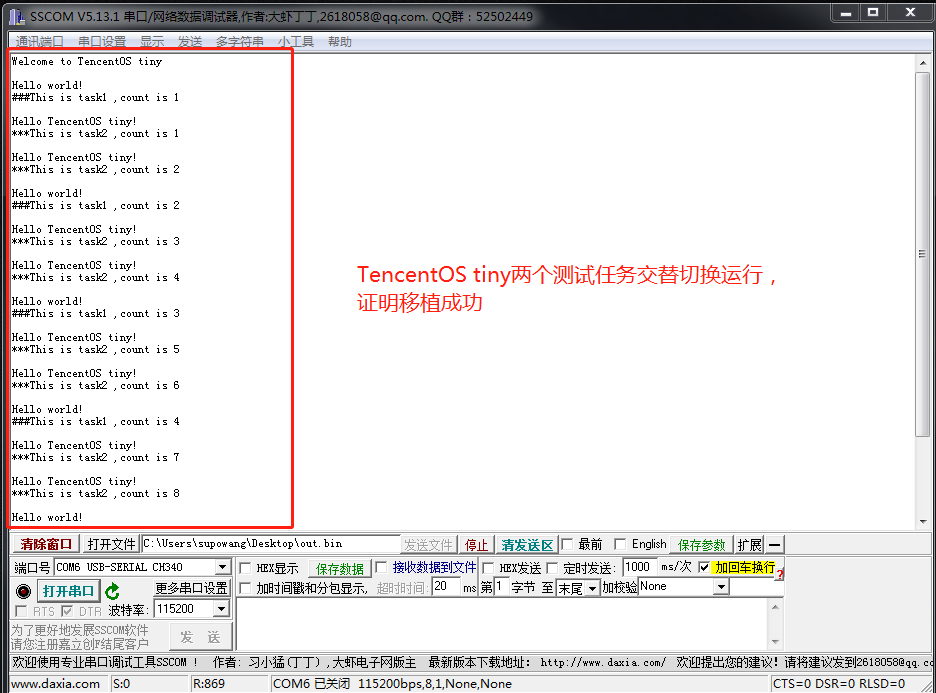
完成代码编辑后回到TencentOS_tiny\board\NUCLEO_L073RZ目录下,找到makefile文件,该目录下打开cmd命令窗口,输入make命令进行编译,得到bin文件,然后将bin文件通过下载工具下载到开发板即可完成TencentOS tiny的测试,如下图所示,可以看到串口交替打印信息,表示两个任务正在进行调度,切换运行: