Move to table
This wiki page contains description of working process of the move_to_table node. Additional information about the latter is available at Nodes summary.
Working process of the move_to_table node follows this algorithm:
-
The move_to_table node gets map of environment using the static_map service.
-
The move_to_table node finds a needed box on the map. To do this it finds any contour on the map, which can be enveloped with a rectangle, whose width (
w) and length (l) satisfy the expression:(w - table_width < max_size_error) && (l - table_length < max_size_error)where table_width, table_length and max_size_error - parameters of the move_to_table node.
Methods, which are used by the node for this search, have descriptions on the following pages: Canny Edge Detector, Finding contours and Bounding rotated boxes.
-
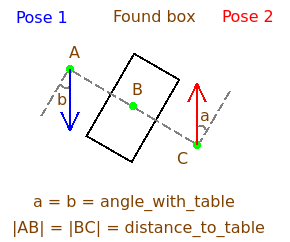
The move_to_table node "asks" the move_base to bring the robot to one of the poses near the found box which are shown on the picture below. distance_to_table and angle_with_table, which are mentioned on it, - parameters of the move_to_table node.