diff --git a/examples/cpp/stereo_vision_slam/README.md b/examples/cpp/stereo_vision_slam/README.md
new file mode 100644
index 000000000000..70a978187c3c
--- /dev/null
+++ b/examples/cpp/stereo_vision_slam/README.md
@@ -0,0 +1,182 @@
+
+
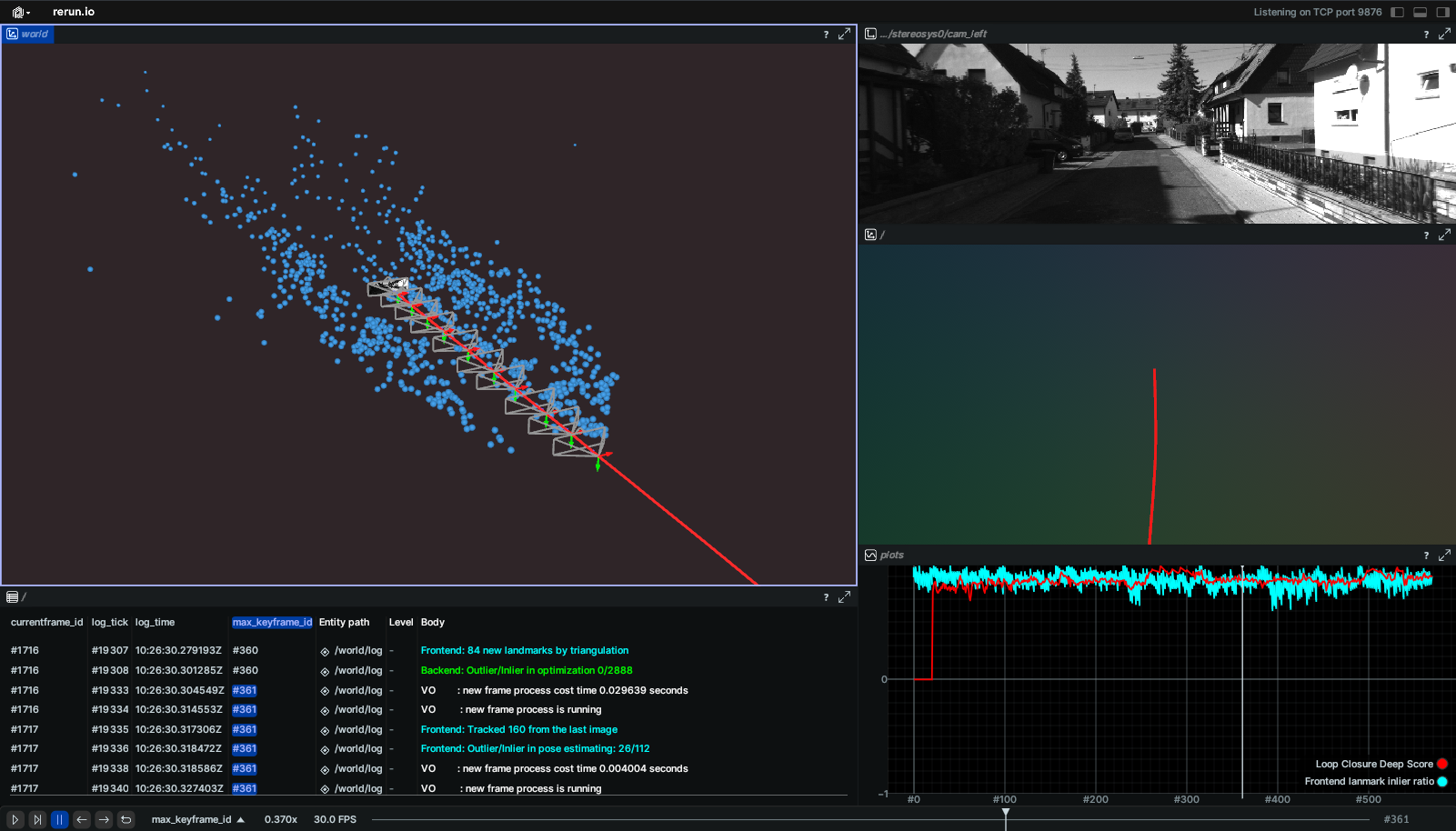
+Visualizes stereo vision SLAM on the [KITTI dataset](https://www.cvlibs.net/datasets/kitti/).
+
+
+  +
+
+
+
+
+
+# Used Rerun types
+
+[`Image`](https://www.rerun.io/docs/reference/types/archetypes/image), [`LineStrips3D`](https://rerun.io/docs/reference/types/archetypes/line_strips3d), [`Scalar`](https://rerun.io/docs/reference/types/archetypes/scalar), [`Transform3D`](https://rerun.io/docs/reference/types/archetypes/transform3d), [`Pinhole`](https://rerun.io/docs/reference/types/archetypes/pinhole), [`Points3D`](https://rerun.io/docs/reference/types/archetypes/points3d), [`TextLog`](https://rerun.io/docs/reference/types/archetypes/text_log)
+
+
+# Background
+
+This example shows [farhad-dalirani's stereo visual SLAM implementation](https://github.com/farhad-dalirani/StereoVision-SLAM). It's input is the video footage from a stereo camera and it produces the trajectory of the vehicle and a point cloud of the surrounding environment.
+
+# Logging and visualizing with Rerun
+
+To easily use Opencv/Eigen types and avoid copying images/points when logging to Rerun it uses [`CollectionAdapter`](https://ref.rerun.io/docs/cpp/stable/structrerun_1_1CollectionAdapter.html) with the following code:
+```cpp
+
+template <>
+struct rerun::CollectionAdapter
+{
+ /* Adapters to borrow an OpenCV image into Rerun
+ * images without copying */
+
+ Collection operator()(const cv::Mat& img)
+ {
+ // Borrow for non-temporary.
+
+ assert("OpenCV matrix expected have bit depth CV_U8" && CV_MAT_DEPTH(img.type()) == CV_8U);
+ return Collection::borrow(img.data, img.total() * img.channels());
+ }
+
+ Collection operator()(cv::Mat&& img)
+ {
+ /* Do a full copy for temporaries (otherwise the data
+ * might be deleted when the temporary is destroyed). */
+
+ assert("OpenCV matrix expected have bit depth CV_U8" && CV_MAT_DEPTH(img.type()) == CV_8U);
+ std::vector img_vec(img.total() * img.channels());
+ img_vec.assign(img.data, img.data + img.total() * img.channels());
+ return Collection::take_ownership(std::move(img_vec));
+ }
+};
+
+
+template <>
+struct rerun::CollectionAdapter>
+{
+ /* Adapters to log eigen vectors as rerun positions*/
+
+ Collection operator()(const std::vector& container)
+ {
+ // Borrow for non-temporary.
+ return Collection::borrow(container.data(), container.size());
+ }
+
+ Collection operator()(std::vector&& container)
+ {
+ /* Do a full copy for temporaries (otherwise the data
+ * might be deleted when the temporary is destroyed). */
+ std::vector positions(container.size());
+ memcpy(positions.data(), container.data(), container.size() * sizeof(Eigen::Vector3f));
+ return Collection::take_ownership(std::move(positions));
+ }
+};
+
+
+template <>
+struct rerun::CollectionAdapter
+{
+ /* Adapters so we can log an eigen matrix as rerun positions */
+
+ // Sanity check that this is binary compatible.
+ static_assert(
+ sizeof(rerun::Position3D) == sizeof(Eigen::Matrix3Xf::Scalar) * Eigen::Matrix3Xf::RowsAtCompileTime
+ );
+
+ Collection operator()(const Eigen::Matrix3Xf& matrix)
+ {
+ // Borrow for non-temporary.
+ static_assert(alignof(rerun::Position3D) <= alignof(Eigen::Matrix3Xf::Scalar));
+ return Collection::borrow(
+ // Cast to void because otherwise Rerun will try to do above sanity checks with the wrong type (scalar).
+ reinterpret_cast(matrix.data()),
+ matrix.cols()
+ );
+ }
+
+ Collection operator()(Eigen::Matrix3Xf&& matrix)
+ {
+ /* Do a full copy for temporaries (otherwise the
+ * data might be deleted when the temporary is destroyed). */
+ std::vector positions(matrix.cols());
+ memcpy(positions.data(), matrix.data(), matrix.size() * sizeof(rerun::Position3D));
+ return Collection::take_ownership(std::move(positions));
+ }
+};
+
+```
+
+## Images
+```cpp
+// Draw stereo left image
+rec.log(entity_name,
+ rerun::Image(tensor_shape(kf_sort[0].second->left_img_),
+ rerun::TensorBuffer::u8(kf_sort[0].second->left_img_)));
+```
+
+## Pinhole camera
+
+The camera frames shown in the space view is generated by the following code:
+
+```cpp
+rec.log(entity_name,
+ rerun::Transform3D(
+ rerun::Vec3D(camera_position.data()),
+ rerun::Mat3x3(camera_orientation.data()), true)
+);
+// …
+rec.log(entity_name,
+ rerun::Pinhole::from_focal_length_and_resolution({fx, fy}, {img_num_cols, img_num_rows}));
+```
+
+## Time series
+```cpp
+void Viewer::Plot(std::string plot_name, double value, unsigned long maxkeyframe_id)
+{
+ // …
+ rec.set_time_sequence("max_keyframe_id", maxkeyframe_id);
+ rec.log(plot_name, rerun::Scalar(value));
+}
+```
+
+## Trajectory
+```cpp
+rec.log("world/path",
+ rerun::Transform3D(
+ rerun::Vec3D(camera_position.data()),
+ rerun::Mat3x3(camera_orientation.data()), true));
+
+std::vector path;
+// …
+rec.log("world/path", rerun::LineStrips3D(rerun::LineStrip3D(path)));
+```
+
+## Point cloud
+```cpp
+rec.log("world/landmarks",
+ rerun::Transform3D(
+ rerun::Vec3D(camera_position.data()),
+ rerun::Mat3x3(camera_orientation.data()), true));
+
+std::vector points3d_vector;
+// …
+rec.log("world/landmarks", rerun::Points3D(points3d_vector));
+```
+
+## Text log
+
+```cpp
+rec.log("world/log", rerun::TextLog(msg).with_color(log_color.at(log_type)));
+// …
+rec.log("world/log", rerun::TextLog("Finished"));
+```
+
+# Run the code
+
+This is an external example, check the [repository](https://github.com/rerun-io/StereoVision-SLAM) on how to run the code.
diff --git a/examples/manifest.toml b/examples/manifest.toml
index b727acd16cec..7db196c189ba 100644
--- a/examples/manifest.toml
+++ b/examples/manifest.toml
@@ -93,6 +93,7 @@ examples = [
"open_photogrammetry_format",
"kiss-icp",
"differentiable_blocks_world",
+ "stereo_vision_slam",
"signed_distance_fields",
"raw_mesh",
]
+
+
+
+
+
+
+# Used Rerun types
+
+[`Image`](https://www.rerun.io/docs/reference/types/archetypes/image), [`LineStrips3D`](https://rerun.io/docs/reference/types/archetypes/line_strips3d), [`Scalar`](https://rerun.io/docs/reference/types/archetypes/scalar), [`Transform3D`](https://rerun.io/docs/reference/types/archetypes/transform3d), [`Pinhole`](https://rerun.io/docs/reference/types/archetypes/pinhole), [`Points3D`](https://rerun.io/docs/reference/types/archetypes/points3d), [`TextLog`](https://rerun.io/docs/reference/types/archetypes/text_log)
+
+
+# Background
+
+This example shows [farhad-dalirani's stereo visual SLAM implementation](https://github.com/farhad-dalirani/StereoVision-SLAM). It's input is the video footage from a stereo camera and it produces the trajectory of the vehicle and a point cloud of the surrounding environment.
+
+# Logging and visualizing with Rerun
+
+To easily use Opencv/Eigen types and avoid copying images/points when logging to Rerun it uses [`CollectionAdapter`](https://ref.rerun.io/docs/cpp/stable/structrerun_1_1CollectionAdapter.html) with the following code:
+```cpp
+
+template <>
+struct rerun::CollectionAdapter
+{
+ /* Adapters to borrow an OpenCV image into Rerun
+ * images without copying */
+
+ Collection operator()(const cv::Mat& img)
+ {
+ // Borrow for non-temporary.
+
+ assert("OpenCV matrix expected have bit depth CV_U8" && CV_MAT_DEPTH(img.type()) == CV_8U);
+ return Collection::borrow(img.data, img.total() * img.channels());
+ }
+
+ Collection operator()(cv::Mat&& img)
+ {
+ /* Do a full copy for temporaries (otherwise the data
+ * might be deleted when the temporary is destroyed). */
+
+ assert("OpenCV matrix expected have bit depth CV_U8" && CV_MAT_DEPTH(img.type()) == CV_8U);
+ std::vector img_vec(img.total() * img.channels());
+ img_vec.assign(img.data, img.data + img.total() * img.channels());
+ return Collection::take_ownership(std::move(img_vec));
+ }
+};
+
+
+template <>
+struct rerun::CollectionAdapter>
+{
+ /* Adapters to log eigen vectors as rerun positions*/
+
+ Collection operator()(const std::vector& container)
+ {
+ // Borrow for non-temporary.
+ return Collection::borrow(container.data(), container.size());
+ }
+
+ Collection operator()(std::vector&& container)
+ {
+ /* Do a full copy for temporaries (otherwise the data
+ * might be deleted when the temporary is destroyed). */
+ std::vector positions(container.size());
+ memcpy(positions.data(), container.data(), container.size() * sizeof(Eigen::Vector3f));
+ return Collection::take_ownership(std::move(positions));
+ }
+};
+
+
+template <>
+struct rerun::CollectionAdapter
+{
+ /* Adapters so we can log an eigen matrix as rerun positions */
+
+ // Sanity check that this is binary compatible.
+ static_assert(
+ sizeof(rerun::Position3D) == sizeof(Eigen::Matrix3Xf::Scalar) * Eigen::Matrix3Xf::RowsAtCompileTime
+ );
+
+ Collection operator()(const Eigen::Matrix3Xf& matrix)
+ {
+ // Borrow for non-temporary.
+ static_assert(alignof(rerun::Position3D) <= alignof(Eigen::Matrix3Xf::Scalar));
+ return Collection::borrow(
+ // Cast to void because otherwise Rerun will try to do above sanity checks with the wrong type (scalar).
+ reinterpret_cast(matrix.data()),
+ matrix.cols()
+ );
+ }
+
+ Collection operator()(Eigen::Matrix3Xf&& matrix)
+ {
+ /* Do a full copy for temporaries (otherwise the
+ * data might be deleted when the temporary is destroyed). */
+ std::vector positions(matrix.cols());
+ memcpy(positions.data(), matrix.data(), matrix.size() * sizeof(rerun::Position3D));
+ return Collection::take_ownership(std::move(positions));
+ }
+};
+
+```
+
+## Images
+```cpp
+// Draw stereo left image
+rec.log(entity_name,
+ rerun::Image(tensor_shape(kf_sort[0].second->left_img_),
+ rerun::TensorBuffer::u8(kf_sort[0].second->left_img_)));
+```
+
+## Pinhole camera
+
+The camera frames shown in the space view is generated by the following code:
+
+```cpp
+rec.log(entity_name,
+ rerun::Transform3D(
+ rerun::Vec3D(camera_position.data()),
+ rerun::Mat3x3(camera_orientation.data()), true)
+);
+// …
+rec.log(entity_name,
+ rerun::Pinhole::from_focal_length_and_resolution({fx, fy}, {img_num_cols, img_num_rows}));
+```
+
+## Time series
+```cpp
+void Viewer::Plot(std::string plot_name, double value, unsigned long maxkeyframe_id)
+{
+ // …
+ rec.set_time_sequence("max_keyframe_id", maxkeyframe_id);
+ rec.log(plot_name, rerun::Scalar(value));
+}
+```
+
+## Trajectory
+```cpp
+rec.log("world/path",
+ rerun::Transform3D(
+ rerun::Vec3D(camera_position.data()),
+ rerun::Mat3x3(camera_orientation.data()), true));
+
+std::vector path;
+// …
+rec.log("world/path", rerun::LineStrips3D(rerun::LineStrip3D(path)));
+```
+
+## Point cloud
+```cpp
+rec.log("world/landmarks",
+ rerun::Transform3D(
+ rerun::Vec3D(camera_position.data()),
+ rerun::Mat3x3(camera_orientation.data()), true));
+
+std::vector points3d_vector;
+// …
+rec.log("world/landmarks", rerun::Points3D(points3d_vector));
+```
+
+## Text log
+
+```cpp
+rec.log("world/log", rerun::TextLog(msg).with_color(log_color.at(log_type)));
+// …
+rec.log("world/log", rerun::TextLog("Finished"));
+```
+
+# Run the code
+
+This is an external example, check the [repository](https://github.com/rerun-io/StereoVision-SLAM) on how to run the code.
diff --git a/examples/manifest.toml b/examples/manifest.toml
index b727acd16cec..7db196c189ba 100644
--- a/examples/manifest.toml
+++ b/examples/manifest.toml
@@ -93,6 +93,7 @@ examples = [
"open_photogrammetry_format",
"kiss-icp",
"differentiable_blocks_world",
+ "stereo_vision_slam",
"signed_distance_fields",
"raw_mesh",
]
 +
+