This is the official code release of the following paper:
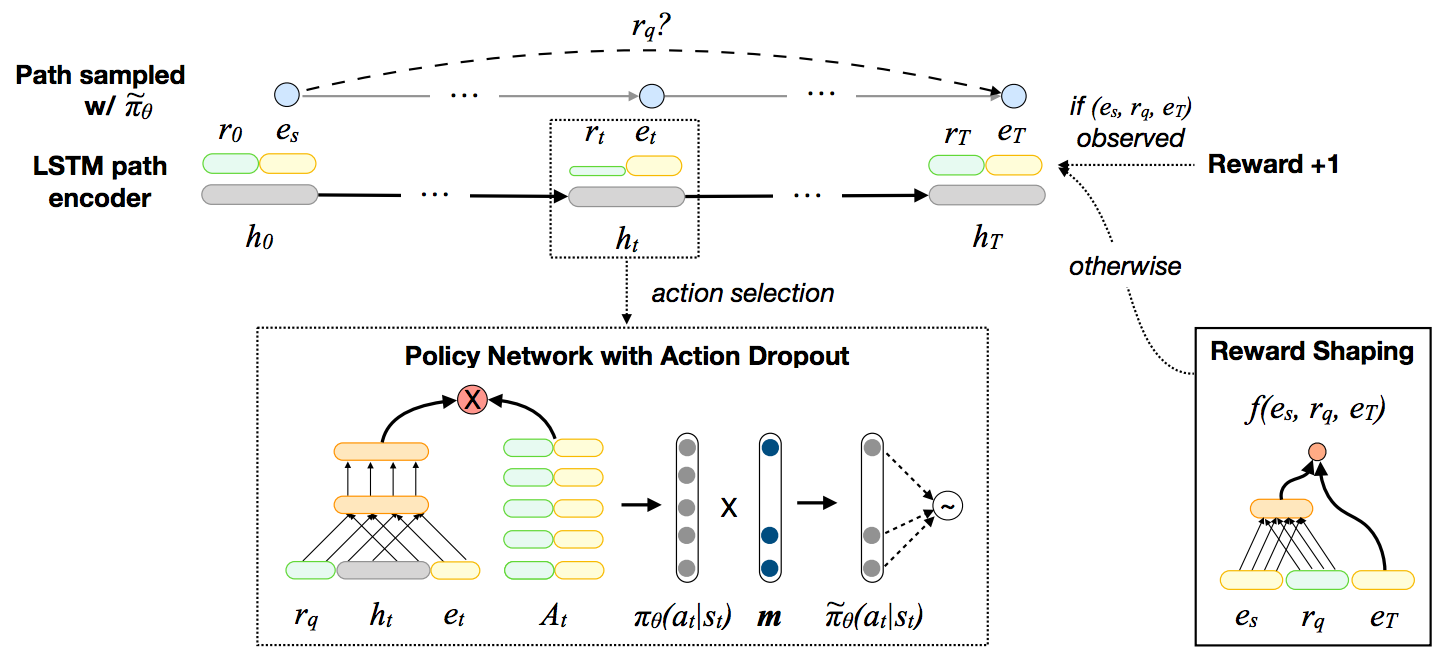
Xi Victoria Lin, Richard Socher and Caiming Xiong. Multi-Hop Knowledge Graph Reasoning with Reward Shaping. EMNLP 2018.
Build the docker image
docker build -< Dockerfile -t multi_hop_kg:v1.0
Spin up a docker container and run experiments inside it.
nvidia-docker run -v `pwd`:/workspace/MultiHopKG -it multi_hop_kg:v1.0
The rest of the readme assumes that one works interactively inside a container. If you prefer to run experiments outside a container, please change the commands accordingly.
Alternatively, you can install Pytorch (>=0.4.1) manually and use the Makefile to set up the rest of the dependencies.
make setup
First, unpack the data files
tar xvzf data-release.tgz
and run the following command to preprocess the datasets.
./experiment.sh configs/<dataset>.sh --process_data <gpu-ID>
<dataset> is the name of any dataset folder in the ./data directory. In our experiments, the five datasets used are: umls, kinship, fb15k-237, wn18rr and nell-995.
<gpu-ID> is a non-negative integer number representing the GPU index.
Then the following commands can be used to train the proposed models and baselines in the paper. By default, dev set evaluation results will be printed when training terminates.
- Train embedding-based models
./experiment-emb.sh configs/<dataset>-<emb_model>.sh --train <gpu-ID>
The following embedding-based models are implemented: distmult, complex and conve.
- Train RL models (policy gradient)
./experiment.sh configs/<dataset>.sh --train <gpu-ID>
- Train RL models (policy gradient + reward shaping)
./experiment-rs.sh configs/<dataset>-rs.sh --train <gpu-ID>
- Note: To train the RL models using reward shaping, make sure 1) you have pre-trained the embedding-based models and 2) set the file path pointers to the pre-trained embedding-based models correctly (example configuration file).
To generate the evaluation results of a pre-trained model, simply change the --train flag in the commands above to --inference.
For example, the following command performs inference with the RL models (policy gradient + reward shaping) and prints the evaluation results (on both dev and test sets).
./experiment-rs.sh configs/<dataset>-rs.sh --inference <gpu-ID>
To print the inference paths generated by beam search during inference, use the --save_beam_search_paths flag:
./experiment-rs.sh configs/<dataset>-rs.sh --inference <gpu-ID> --save_beam_search_paths
-
Note for the NELL-995 dataset:
On this dataset we split the original training data into
train.triplesanddev.triples, and the final model to test has to be trained with these two files combined.- To obtain the correct test set results, you need to add the
--testflag to all data pre-processing, training and inference commands.
# You may need to adjust the number of training epochs based on the dev set development. ./experiment.sh configs/nell-995.sh --process_data <gpu-ID> --test ./experiment-emb.sh configs/nell-995-conve.sh --train <gpu-ID> --test ./experiment-rs.sh configs/NELL-995-rs.sh --train <gpu-ID> --test ./experiment-rs.sh configs/NELL-995-rs.sh --inference <gpu-ID> --test- Leave out the
--testflag during development.
- To obtain the correct test set results, you need to add the
To change the hyperparameters and other experiment set up, start from the configuration files.
We use mini-batch training in our experiments. To save the amount of paddings (which can cause memory issues and slow down computation for knowledge graphs that contain nodes with large fan-outs), we group the action spaces of different nodes into buckets based on their sizes. Description of the bucket implementation can be found here and here.
If you find the resource in this repository helpful, please cite
@inproceedings{LinRX2018:MultiHopKG,
author = {Xi Victoria Lin and Richard Socher and Caiming Xiong},
title = {Multi-Hop Knowledge Graph Reasoning with Reward Shaping},
booktitle = {Proceedings of the 2018 Conference on Empirical Methods in Natural
Language Processing, {EMNLP} 2018, Brussels, Belgium, October
31-November 4, 2018},
year = {2018}
}