This is code for "DVI: Depth Guided Video Inpainting for Autonomous Driving". ECCV 2020. Project Page

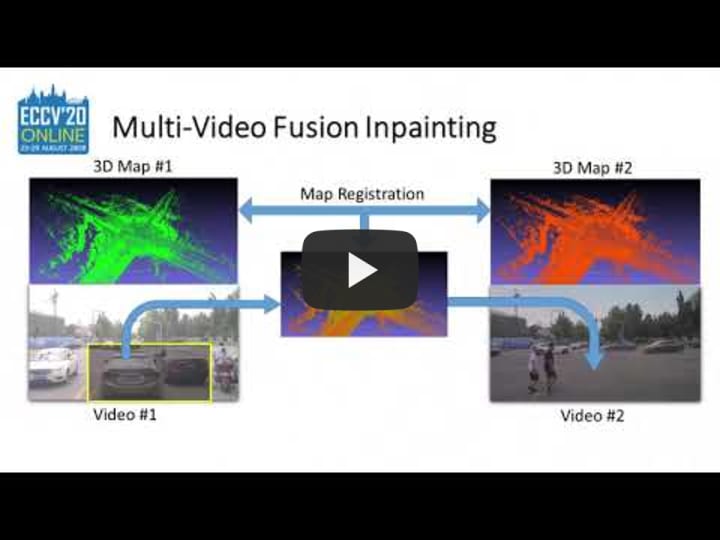
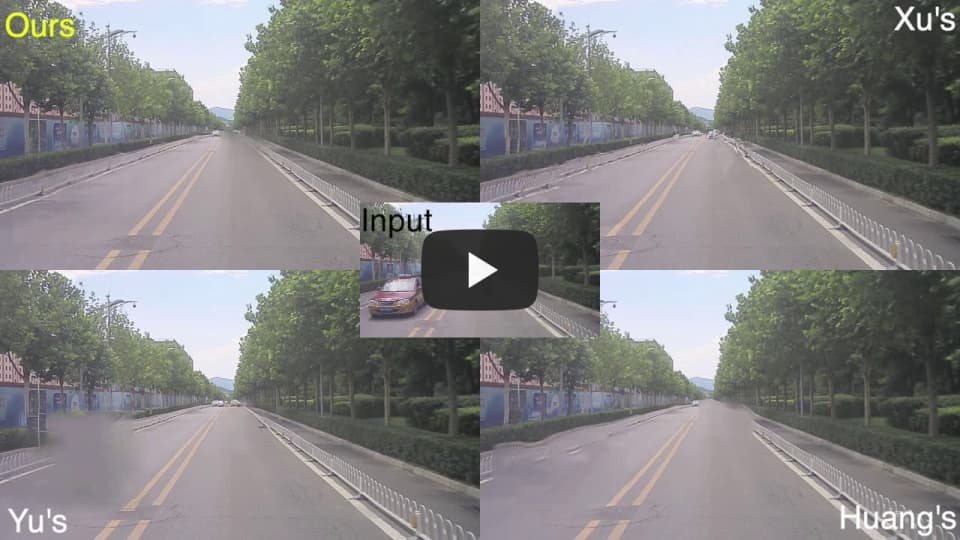
To get clear street-view and photo-realistic simulation in autonomous driving, we present an automatic video inpainting algorithm that can remove traffic agents from videos and synthesize missing regions with the guidance of depth/point cloud. By building a dense 3D map from stitched point clouds, frames within a video are geometrically correlated via this common 3D map. In order to fill a target inpainting area in a frame, it is straightforward to transform pixels from other frames into the current one with correct occlusion. Furthermore, we are able to fuse multiple videos through 3D point cloud registration, making it possible to inpaint a target video with multiple source videos.

Inpainting dataset consists of synchronized Labeled image and LiDAR scanned point clouds. It captured by HESAI Pandora All-in-One Sensing Kit. It is collected under various lighting conditions and traffic densities in Beijing, China.
Please download full data at Apolloscape or using link below. The first video inpainting dataset with depth. The synced lidar and image data also can be used for 3D perception and other tasks.
Sample data: sample_mask_and_image.zip sample_data.zip sample_lidar_bg.zip
Full data:
mask_and_image_0.zip data_0.zip lidar_bg_0.zip
mask_and_image_1.zip data_1.zip lidar_bg_1.zip
mask_and_image_2.zip data_2.zip lidar_bg_2.zip
mask_and_image_3.zip data_3.zip lidar_bg_3.zip
The folder structure of the inpainting is as follows:
-
xxx-yyy_mask.zip: xxx.aaa.jpg is original image. xxx.aaa.png is labelled mask of cars.
-
xxx-yyy.zip: Data includes ds_map.ply, global_poses.txt, rel_poses.txt, xxx.aaa_optR.xml. ds_map.ply is dense map build from lidar frames.
-
lidar_bg.zip: lidar background point cloud in ply format.
catkin_ws
├── build
├── devel
├── src
code
├── libDAI-0.3.0
├── opengm
data
├── pandora_liang
├── set2
├── 1534313590-1534313597
├── 1534313590-1534313597_mask
├── 1534313590-1534313597_results
├── lidar_bg
├── ...
-
Install ROS Kinetic at http://wiki.ros.org/ROS/Installation
-
Install opengm
download OpenGM 2.3.5 at http://hciweb2.iwr.uni-heidelberg.de/opengm/index.php?l0=library
or
https://github.com/opengm/opengm for version 2.0.2
-
Build opengm with MRF:
cd code/opengm mkdir build cd build cmake -DWITH_MRF=ON .. make sudo make install -
Make catkin:
cd catkin_ws source devel/setup.bash catkin_make
cd catkin_ws
rosrun loam_velodyne videoInpaintingTexSynthFusion 1534313590 1534313597 1534313594 ../data/pandora_liang/set2
| Method | MAE | RMSE | PSNR | SSIM |
|---|---|---|---|---|
| DVI | 6.135 | 9.633 | 21.631 | 0.895 |
-
Label Mask image of inpainting area
python label_mask.pyF: forward S: undo D: backward
-
Build 3D map from lider frames
rosrun loam_velodyne loamMapper 1534313591 1534313599 /disk1/data/pandora_liang/set2Get global_pose.txt rel_pose.txt. Use meshlab to visualize ds_map.ply
Please cite our paper in your publications.
DVI: Depth Guided Video Inpainting for Autonomous Driving.
Miao Liao, Feixiang Lu, Dingfu Zhou, Sibo Zhang, Wei Li, Ruigang Yang. ECCV 2020. PDF, Webpage, Inpainting Dataset, Result Video, Presentation Video
@inproceedings{liao2020dvi,
title={DVI: Depth Guided Video Inpainting for Autonomous Driving},
author={Liao, Miao and Lu, Feixiang and Zhou, Dingfu and Zhang, Sibo and Li, Wei and Yang, Ruigang},
booktitle={European Conference on Computer Vision},
pages={1--17},
year={2020},
organization={Springer}
}
ECCV 2020 Presentation Video
Result Video
Get MRF-LIB working within opengm2:
~/code/opengm/build$ cmake -DWITH_MRF=ON .. #turn on MRF option within opengm cmake
~/code/opengm/src/external/patches/MRF$ ./patchMRF-v2.1.sh
Change to:
TRWS_URL=https://download.microsoft.com/download/6/E/D/6ED0E6CF-C06E-4D4E-9F70-C5932795CC12/
Within patchMRF-v2.1.sh