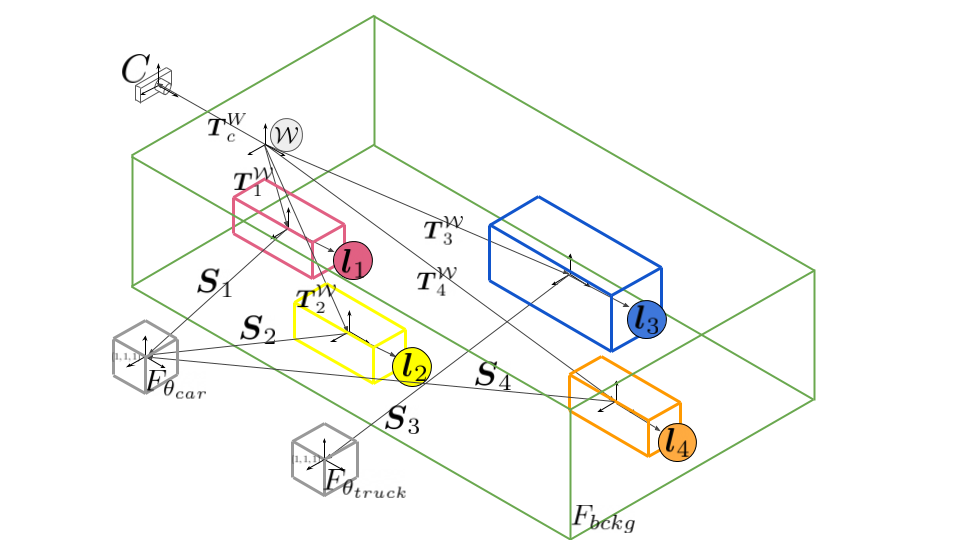
Implementation of Neural Scene Graphs, that optimizes multiple radiance fields to represent different objects and a static scene background. Learned representations can be rendered with novel object compositions and views.
Original repository forked from the Implementation of "NeRF: Neural Radiance Fields" by Mildenhall et al.: Original NeRF Implementation, original readme; and Origional TensorFlow Implementation.
The whole script is currently optimized for the usage with Virtual KITTI 2 Dataset and KITTI
conda create -n neural_scene_graphs python=3.11
conda activate neural_scene_graphs
cd neural-scene-graphs-pytorch
pip install -r requirements.txt
bash download_virtual_kitti.sh
python main.py --config example_configs/config_vkitti2_Scene06.txt
tensorboard --logdir=example_weights/summaries --port=6006
- Get the KITTI MOT dataset, from which you need:
- Extract everything to
./data/kittiand keep the data structure - Neural Scene Graphs is well tested and published on real front-facing scenarios with only small movements along the camera viewing direction. We therefore prepared selected config files for KITTI Scenes (0001, 0002, 0006)
bash ./download_virtual_kitti.sh
To optimize models on a subsequence of Virtual KITTI 2 or KITTI, create the environment, download the data set (1.2) and optimize the (pre-trained) background and object models together:
conda create -n neural_scene_graphs --file requirements.txt -c conda-forge -c menpo
conda activate neural_scene_graphs
vkitti2 example:
python main.py --config example_configs/config_vkitti2_Scene06.txt
tensorboard --logdir=example_weights/summaries --port=6006
KITTI example:
python main.py --config example_configs/config_kitti_0006_example_train.txt
tensorboard --logdir=example_weights/summaries --port=6006
bash download_weights_kitti.sh
python main.py --config example_configs/config_kitti_0006_example_render.txt
To render a pre-trained download the weights or use your own model.
bash download_weights_kitti.sh
To make a full render pass over all selected images (between the first and last frame) run the provided config with 'render_only=True'.
- To render only the outputs of the static background node use 'bckg_only=True'
- for all dynamic parts set 'obj_only=True' & 'white_bkgd=True'
python main.py --config example_configs/config_kitti_0006_example_render.txt
Citation
@InProceedings{Ost_2021_CVPR,
author = {Ost, Julian and Mannan, Fahim and Thuerey, Nils and Knodt, Julian and Heide, Felix},
title = {Neural Scene Graphs for Dynamic Scenes},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2021},
pages = {2856-2865}
}