PoMoCo
You'll need a Python environment on your PC. Python comes pre-installed on Mac and many Unix Systems, but not on Windows.
Since Python is included in Mac OS X, you'll simply need to install the PySerial library.
-
Install PySerial:
$ sudo easy_install pyserial
- Download and install Python
- If on a 32bit Windows PC, get the x86 version of PySerial
- If on a 64bit Windows PC, get the amd64 version of PySerial
Python is installed by default. PySerial is also installed by default, but unfortunately the package in the normal repositories is an older version, so you'll need to update it manually.
-
Install PIP:
$ sudo apt-get install python-pip -
Update PySerial:
$ sudo pip install pyserial --upgrade
PoMoCo may be launched by changing into the PoMoCo directory and running the following:
Mac Example
$ cd PoMoCo
$ python PoMoCo.pyWindows Example
With python installed, double click on PoMoCo.py in the PoMoCo folder
Once launched, it can take PoMoCo a few moments to scan your serial devices and connect to your Servotor board, so please be patient. Once connected, you'll be greeted by the PoMoCo user interface:
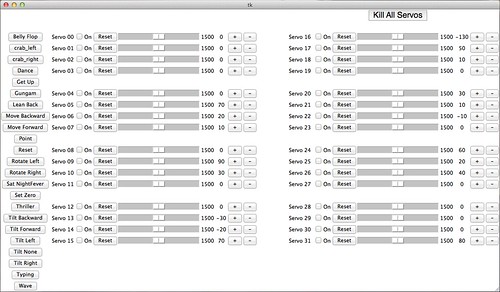
PoMoCo lets you fine-tune your servos by creating an "offset" file that can be automatically loaded whenever PoMoCo is executed.
The first step is to run the setZero preset on the left hand column of buttons or by selecting individual servos by checking the On checkbox and pressing the "Reset" button adjacent to the reset button. Then use the + and - buttons to adjust and center the servo in question.
Saving Offsets: Save your offsets by selecting File > Save offsets from the PoMoCo menu bar. Be sure to save the offset configuration file into the PoMoCo directory and verify that the filename ends in ".cfg" such as hexy-offsets.cfg.