Home
This guide contains a more detailed and up to date version of the instructions provided in the paper:
Domenico Stefani, Luca Turchet "Real-Time Embedded Deep Learning on Elk Audio OS" in International Symposium on the Internet of Sounds (IS2), Pisa, Italy Oct 2023 (Accepted)
The paper will soon be available here
-
Tools
1.1. JUCE and VST
1.2. Elk Audio OS
1.3. Choice of Inference Engine
1.4. Project's Repository -
Stepwise deployment procedure
2.1. JUCE VST plugin creation
····2.1.1. Templates
····2.1.2. Manual Creation
2.2. Cross-compilation for Elk Audio OS
····2.2.1. Dependencies Compilation
····2.2.2. Plugins Compilation
2.3. Elk Audio OS on the Raspberry
2.4. DAW configuration: Sushi
2.5. Diagnostic tools
JUCE is a cross-platform framework for audio plugins and applications. It is a C++ framework with a dual license (i.e., GPLv3 open-source and commercial). JUCE embeds the VST3 SDK and Elk Audio provides support and instructions on how to build a JUCE plugin for their OS. The procedure reported in this guide was tested with JUCE 6 (version 6.0.7).
Elk Audio OS is an embedded operating
system optimized for low-latency audio processing on embedded hardware.
Currently, Elk offers a disk image and a cross-compilation SDK for the
Raspberry Pi 4 single-board computer, and
more hardware platforms (see the docs) under a commercial license. Moreover, up
to Elk Audio OS version 0.7.2 Raspberry Pi 3 was supported. The
instructions in the paper connected to this guide refer to version 0.11.0. Nevertheless, we will try to keep the
online repository and this guide updated with the latest version of the OS.
Inference of deep learning models is the process of running an input through the network and executing all the computations required to produce an output prediction. deep learning models are generally trained and tested in powerful server machines or PCs, using high-level programming languages (e.g., Python) and deep learning frameworks (e.g., PyTorch, TensorFlow). Training through backpropagation is a particularly compute-intensive task that often requires specialized acceleration hardware and drivers (e.g., CUDA GPUs or TPUs). On the contrary, inference is considerably less computationally expensive and can be optimized for deployment.
In recent years, deep learning framework companies and developers have focused on in-device inference for edge and mobile computing. In Internet of Things (IoT), edge computing has the great advantage of performing relevant computations closer to where input data is gathered. Even more so, embedded in-device inference can be advantageous in terms of action-to-reaction latency, since inference computations can be performed right at the place where the inputs are gathered through sensors, which is devoid of the latency of communication with one or more cloud servers. While in-device computation can have marginal advantages in some IoT, it is an indisputable requirement of music performance tools and many e Internet of Musical Things (IoMusT) systems, even when the learning task allows for slightly more lenient time constraints than audio-rate deadlines (See [Stefani, 2022a]). For this reason, several C and C++ libraries known as inference engines were made available along with most deep learning frameworks, to allow for efficient and quick inference, especially for resource-constrained embedded devices.
Our previous work [Stefani, 2022b] compared the performance and suitability of four of these engines (i.e., TensorFlow Lite, ONNX Runtime, Torch+Torchscript, and RT Neural) for audio tasks on a Raspberry Pi 4 running Elk Audio OS. While exact execution time can depend on a specific model, ONNX Runtime and TensorFlow Lite have been shown to be very quick, well-documented, and easy to use. For the code templates in the repository of this guide, we decided to include separately both Tensorflow Lite and ONNX runtime because TensorFlow users will find it extremely easy to export their model for the former, while models from most frameworks can also be converted to the ONNX including PyTorch too. Support for ONNX runtime is particularly relevant as a large part of research on black-box audio effect emulation is currently carried out using Pytorch and PyTorch-to-TensorFlow model-conversion is not a straightforward process.
For TensorFlow developers, we suggest choosing the TensorFlow Lite template code, while PyTorch and other developers should convert their models to ONNX and use ONNX Runtime.
This guide is intended help to successfully deploy
deep learning models to
embedded devices running Elk Audio OS and perform inference. While the
steps described in the next section cover all the required actions, from
project creation to a running plugin on an embedded system, we provide
clean source code templates, working examples, and inference engine
binaries in order to reduce the effort required for deployment. This
substantial addition to the written part of this guide is contained in
the elk-audio-AI-tutorial repository on the GitHub page of the Creative, Intelligent &
Multisensory Interactions Laboratory (CIMIL)](https://github.com/CIMIL/elk-audio-AI-tutorial/). Additionally, the online repository
will serve as an up-to-date version of the guide, addressing potential
changes in the new version of Elk Audio OS or inference engines.
This section presents the stepwise procedure to deploy a deep learning model to a Raspberry Pi running the Elk Audio OS. This guide can also be followed for deployment to a VST plugin (ignoring cross-compilation and device-specific steps) for any platform, including Windows, MacOS, and x86-64 Linux. All the code and library binaries required to follow the guide are provided at the project repository, and they will allow readers to skip parts of the guide for easier deployment (e.g., library compilation can be skipped if using the provided binaries). Further updates, improved instructions, and additional inference engines will be added to the repository.
Instructions assume the use of a Unix-based OS and were tested on Linux
x86-64 (i.e. Ubuntu 20.04.6 LTS), but they can be followed using MacOS
systems and Windows with the Windows Subsystem for Linux (WSL) or a virtual machine.
Both WSL
version 1 and 2 should be suitable, but it may be necessary to
enable X11 forwarding to use the graphical version of the Projucer
app.
As mentioned
previously, the instructions in this guide refer to version 0.11.0 of
Elk Audio OS, but the online code repository will be updated with new
versions of the OS. Moreover, we use JUCE 6 (version 6.0.7), the
Projucer app to handle build configuration, and Linux Makefile as
the build system.
Figure 1 shows an overview of the entire deployment
process.
 Figure 1: Diagram depicting the process of deploying a deep learning model to an embedded device running Elk Audio OS. Plugin and dependency compilation happens on a Host computer (top left), where the Elk-PI toolchain allows to cross-compile the source code. Library binaries are linked during plugin compilation, which produces the binary file for a VST plugin that can execute on the target device (right). The compiled plugin has to be moved to the embedded computer running Elk Audio OS, where Elk's DAW Sushi can be configured to load it into a new track and process audio in real-time. The lower part represents the training, testing, and model export phases required for either TensorFlow or frameworks that export to the ONNX format, such as Pytorch. Dashed arrows labeled as 1 and 2 represent two distinct options for model integration: in option 1 the deep learning model gets integrated as JUCE BinaryData into the plugin's binary, while for option 2 the model can be simply copied to the device. For the latter, the plugin code must load the model from a path relative to the target's folder structure.
Figure 1: Diagram depicting the process of deploying a deep learning model to an embedded device running Elk Audio OS. Plugin and dependency compilation happens on a Host computer (top left), where the Elk-PI toolchain allows to cross-compile the source code. Library binaries are linked during plugin compilation, which produces the binary file for a VST plugin that can execute on the target device (right). The compiled plugin has to be moved to the embedded computer running Elk Audio OS, where Elk's DAW Sushi can be configured to load it into a new track and process audio in real-time. The lower part represents the training, testing, and model export phases required for either TensorFlow or frameworks that export to the ONNX format, such as Pytorch. Dashed arrows labeled as 1 and 2 represent two distinct options for model integration: in option 1 the deep learning model gets integrated as JUCE BinaryData into the plugin's binary, while for option 2 the model can be simply copied to the device. For the latter, the plugin code must load the model from a path relative to the target's folder structure.
The next sections will describe the following steps:
- Creation of a JUCE project for deep learning deployment on Elk Audio OS;
- Cross-compilation of a plugin and its dependencies;
- Installation and communication with Elk Audio;
- Configuration of Elk's DAW ;
- Troubleshooting.
JUCE plugins can be created using the Projucer app, which is provided with any JUCE distribution. The Projucer handles the configuration of the project, its export formats, and its build systems along with their different configurations (i.e., exporters). Moreover, it takes care to create the build files for each exporter whenever the project is saved in the Projucer app. Additionally, it can execute a user-defined command every time a project is saved (post-export Shell command). It is also possible to use CMake to set up JUCE projects, but this will not be covered by the written guide.
The following two alternatives can be used to create and customize a JUCE project to compile VST plugins that will be compatible with Elk Audio OS:
- Use of one of the provided templates;
- Manual project creation.
The project repository contains template projects for ONNX
runtime and TensorFlow Lite. These include the precompiled dependencies
and a project configuration (.jucer file). The project configuration file
ensures that the relative inference library is correctly linked, headers
are included and it creates a cross-compilation script for Elk Audio OS.
The user should open the .jucer file with the Projucer and save the project to
create the build folder structure. To use the template as a starting
point for their project, users may want to rename the Plugin and project
itself: this can be achieved by opening the .jucer file with a text editor with
the search-and-replace function and substituting all the occurrences of
the original name (e.g., ONNXrt-VST-template) with the new name. After
each change, the file should be opened with the Projucer app and saved.
Users are expected to modify the template code that loads an inference
model and executes inference depending on their needs and according to
the documentation of each engine (TFlite, ONNX-rt).
Notably, even if Elk Audio OS only handles headless plugins (i.e., without a Graphical User Interface (GUI)) for optimized latency, it is not necessary to remove any GUI code from the plugin editor, as the graphic routines will simply not be called by the Sushi DAW.
The steps needed for manually creating a JUCE project for a VST plugin that is compatible with Elk Audio OS are the following:
-
Open the Projucer app and create a new Audio Plugin project
-
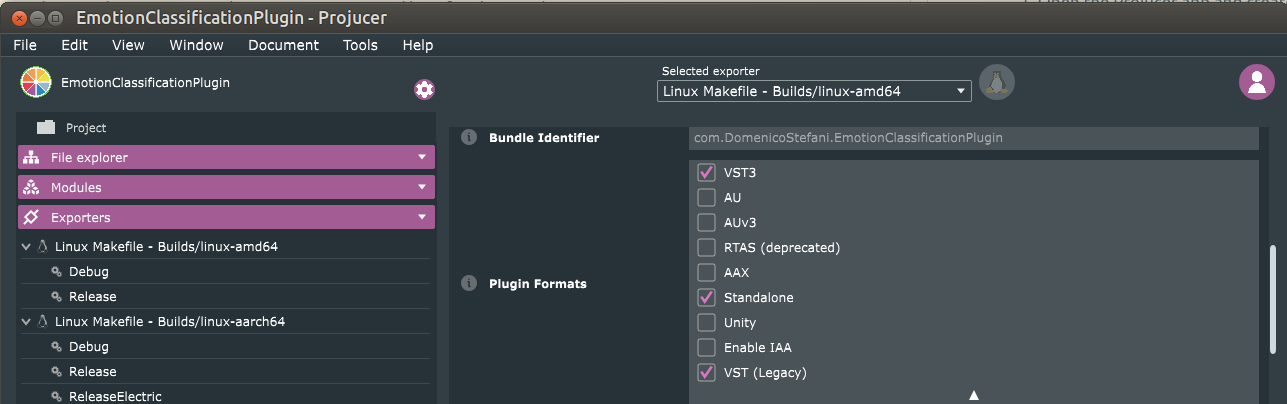
Edit settings (View > Show Project Settings):
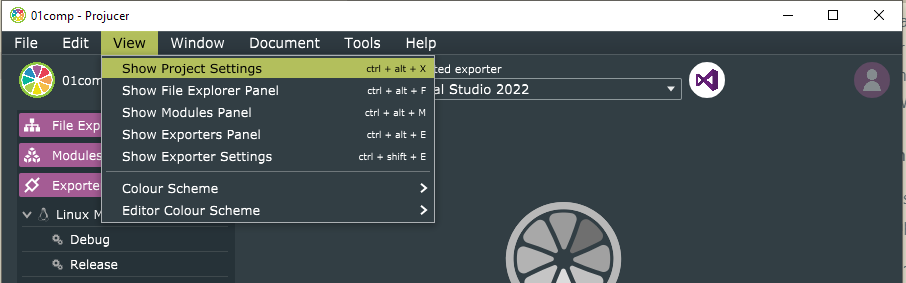
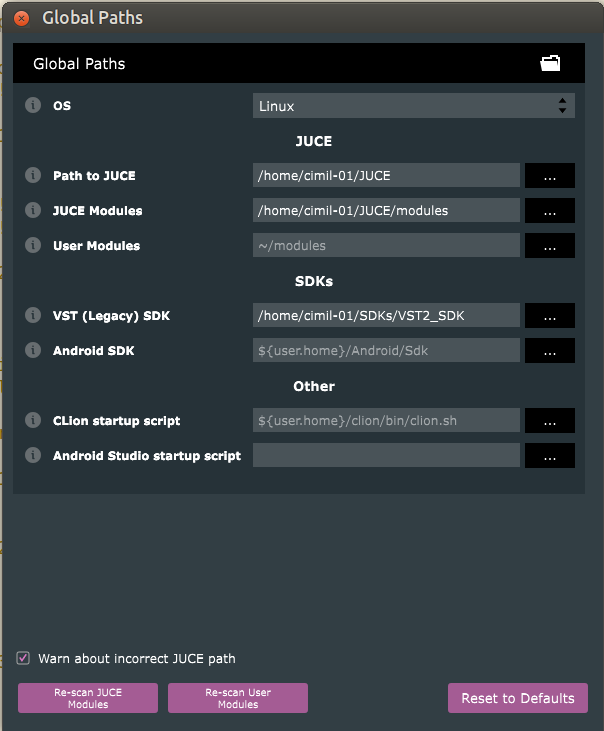
- Set VST3 or VST legacy as Plugin Formats (Specify VST legacy
only if in possession of the now discontinued VST2 SDK, which
should eventually be linked in File > Global Paths);
- Add header folder paths for the inference engine and other
dependencies in the Header Search Paths field. Paths are
relative to the
Builds/<exporter-name>/folder;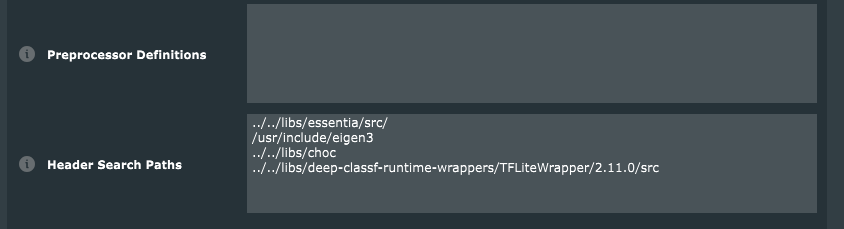
- Set VST3 or VST legacy as Plugin Formats (Specify VST legacy
only if in possession of the now discontinued VST2 SDK, which
should eventually be linked in File > Global Paths);
-
Disable
JUCE_WEB_BROWSERin the juce_gui_extra module (in the Modules panel, on the left of the Projucer window);
-
Create a Linux Makefile exporter (Exporters panel):
- Click the plus icon to create the exporter and specify Linux
Makefile;

- On the main Linux Makefile exporter panel (click on the
explorer) add the name of the libraries to include in the
External Libraries to Link (e.g.,
onnxruntime, to include the binarylibonnxruntime.so);
- On all the configuration panels (e.g., Debug and Release) add
the paths to the included libraries. Paths are relative to the
Builds/<exporter-name>/folder. Make sure that the path leads to a version of the library binary compiled for the target architecture Linux-aarch64. Refer to the section on dependencies compilation};
- Click the plus icon to create the exporter and specify Linux
Makefile;
-
Save the project to create the build directory structure and Makefiles.
-
Manually add a cross-compile script to the
Build/<exporter_name>folder. See the section on TODO for a description of what the script should include, or copy thecompileForElk.shscript that gets automatically generated by the post-export command in the template projects.
As stated above, it is not necessary to remove any GUI code from the project.
Deploying any plugin to Elk Audio OS (especially for Raspberry Pi and resource-constrained devices) will generally involve cross-compilation. Cross-compilation is a technique by which source code is compiled with a cross-compiler on a host computer, resulting in a binary file that is executable on a target computer with an architecture different from that of the host. This enables the compilation of binary executables for embedded devices from a different machine architecture which can take advantage of more powerful hardware. While native compilation on the Raspberry Pi is possible, it is discouraged as anything other than the last resort due to the constrained resources available, thus long computation times (i.e., tens of hours for most engines). In the case of this guide, the host is an x86-64 Linux computer, while the target is an ARM 64bit single-board computer (aarch64 architecture), running the Linux-based real-time Elk Audio OS. To cross-compile any program for a Raspberry Pi with Elk Audio OS, the Elk-PI SDK corresponding to the OS version of choice should be installed and used (see the releases).
It is not necessary to follow the next step (i.e., Dependencies Compilation) to compile a project that depends only on the inference library of choice, as the pre-compiled binaries are included in the project repository.
To cross-compile a plugin, any eternal dependency needs to be compiled. In the case of a simple plugin that integrates deep-learning inference, the sole direct dependency will be the inference engine library (e.g., TensorFlow Lite or ONNX runtime). Additionally, each direct dependency may have sub-dependencies that might need to be included for compilation (See TensorFlow Lite template in the project's repository).
Cross-compilation of the dependencies is complex and not always possible. It can be hard to set up cross-compilation, especially for libraries that were not prepared for it, that are not well documented, or that use less known build systems. Libraries that rely on CMake can be integrated reasonably well with Elk's toolchain. The main steps for cross-compilation of these libraries are the following:
- Downloading and installing the Elk-PI SDK;
- Downloading the library source code for the desired version;
- Creating a
buildfolder; - Resetting
LD_LIBRARY_PATHand sourcing the Elk-PI SDK; - Executing CMake from the build directory:
cmake path/to/CMakeLists/dir/; - Compiling with
make
A working example can be found in the repository for this project for the TensorFlow Lite template.
The example shows how the actual compilation procedure can deviate from
the ideal process, due to peculiar characteristics of some
sub-dependencies or bugs. In particular, for TensorFlow Lite 2.11.0 it
is necessary to change the version of the dependency FlatBuffers from 2.0.6 to 2.0.8
and overwrite the CMAKE_SYSTEM_PROCESSOR variable. This build variable is set to cortexa72 by Elk
toolchain, but the Abseil dependency requires aarch64 to avoid incorrect library
linking. Both corrections were informed by comments in the Issues
section of the Abseil and TensorFlow GitHub repositories (see this and this), which were
consulted by searching for specific error messages produced by failed
compilation runs. A similar informed trial and error procedure can be
followed for other libraries.
The following code snippet shows the compilation script for TensorFlow Lite.
git clone https://github.com/tensorflow/tensorflow.git
cd tensorflow
git checkout v2.11.0
mkdir -p build-aarch64 && cd build-aarch64
sed -i 's/GIT_TAG v2.0.6/GIT_TAG v2.0.8 #https:\/\/github.com\/tensorflow\/tensorflow\/issues\/57617/g' \
../tensorflow/tensorflow/lite/tools/cmake/modules/flatbuffers.cmake
unset LD_LIBRARY_PATH
source /opt/elk/0.11.0/environment-setup-cortexa72-elk-linux
cmake ../tensorflow/tensorflow/lite -DTFLITE_ENABLE_XNNPACK=OFF -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake
export CXXFLAGS="-O3 -pipe -ffast-math -feliminate-unused-debug-types -funroll-loops"
AR=aarch64-elk-linux-ar make -j$(nproc) CONFIG=Release CFLAGS="-Wno-psabi" \
TARGET_ARCH="-mcpu=cortex-a72 -mtune=cortex-a72"
This sequence of commands is required to properly download the TensorFlow source code for version 2.11.0 and cross-compile TensorFlow Lite for Elk Audio OS and the Raspberry Pi4. The sed command represents an example of deviation from the theoretical cross-compilation procedure mentioned in the section about dependencies-compilation, as it is required to fix a compilation bug. It does so by changing the version of the sub-dependency Flatbuffers to include from 2.0.6 to 2.0.8. Additionally, the toolchain.cmake provided in the project's repository sets the value of the CMAKE_SYSTEM_PROCESSOR variable to aarch64 to address a bug with the sub-dependencies Abseil and Cpuinfo.
When cross-compilation is more difficult to set up, compilation can be
performed on the Raspberry Pi, at the expense of compilation time. For
this process, it is suggested to extend the userdata partition in the
Elk-Pi SD card (e.g., using the GParted program on a different
computer), boot the Elk-Pi board, clone or download the library source
code to /udata/, and follow the build instructions of the specific library for
any Linux system. This may require compiling other sub-dependencies
separately, in case they are not included in Elk Audio OS, or
automatically fetched during compilation setup. This was the case for
ONNX runtime, whose compilation required a few tens of hours on the
board, and for which the compiled binary is provided in the repository
of this project.
Whenever a dependency compiles to a dynamic library (i.e. *.so files), the
binary is needed both at linking time (on the host computer) and at
execution time (on the board), when the library is loaded dynamically.
This means that the compiled .so binary for any dependency must be copied to
the board, and placed in one of the system library paths (Run echo $LD_LIBRARY_PATH on the
device to find dynamic loading paths). Alternatively, if placed in any
other directory, the folder containing the binary should be appended
after each reboot, either manually or automatically, to the LD_LIBRARY_PATH system variable as follows:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/libpath/
The export line can be added to the ~/.bashrc or /etc/profile text file for automatic execution.
On the contrary, static libraries (i.e., *.a files) are automatically
included in the plugin binary and do not need to be copied to the board.
Once the inference engine and other libraries required are compiled and properly added to the compilation exporter (see Projucer configuration in the project repository), the plugin can be compiled multiple times without re-compiling dependencies.
Assuming a correct Projucer setup, the steps for plugin compilations are the following:
- Saving the project from the Projucer app, to create the build structure;
- Opening the terminal in the
/build/linux-aarch64folder; - Resetting
LD_LIBRARY_PATH; - Sourcing the Elk-PI SDK;
- Compiling with
make, specifyingJUCE_HEADLESS_PLUGIN_CLIENT=1; - For VST3 plugins, renaming the
PluginName.vst3/Contents/arm64-linuxfolder toaarch64-linux.
Additionally, before the make command, the user can specify additional
optimization flags such as the following:
export CXXFLAGS="-O3 -pipe -ffast-math -feliminate-unused-debug-types -funroll-loops"
The following is a simplified compilation script for any plugin project.
unset LD_LIBRARY_PATH
source /opt/elk/0.11.0/environment-setup-cortexa72-elk-linux
export CXXFLAGS="-O3 -pipe -ffast-math -feliminate-unused-debug-types -funroll-loops"
AR=aarch64-elk-linux-ar make \
-j$(nproc) CONFIG=Release\
CFLAGS="-DJUCE_HEADLESS_PLUGIN_CLIENT=1 -Wno-psabi"\
TARGET_ARCH="-mcpu=cortex-a72 -mtune=cortex-a72"
Elk Audio OS v0.11.0 is available as open source for the Raspberry Pi 4 board (see the repository), while older versions support also the Raspberry Pi 3. More single-board computers are supported under a commercial license. The OS image should be downloaded from the GitHub repository and flashed to a good-quality SD card. The Raspberry Pi must be coupled with an audio "hat" board supported by the OS, such as the HiFiBerry DAC+ ADC and HiFiBerry DAC+ ADC Pro boards.
Once an audio hat board is connected to the Raspberry Pi and the OS SD
is inserted, the board should be powered on and the user can access the
terminal either using a monitor connected via HDMI or with a remote
Secure SHell (SSH) connection. Elk
Audio OS does not have a GUI and requires the user to control it via
terminal, or via network (e.g., using the gRPC or Open Sound Control (OSC) protocols). For remote access to the
terminal, the board can be connected via an ethernet cable to either a
network router or a computer directly. After the first successful
access, the terminal can be used to connect the board to a Wifi network
if desired. The default hostname for Elk-Pi boards is elk-pi.local and it can be used
to identify the board in a local network. To ensure that the board is
connected, use the ping command as follows and wait for a positive reply:
ping elk-pi.local
The arp -a command on a Linux terminal can be useful to find the board IP
address if the hostname is not reachable. Then, the
SSH protocol can be
used to access the terminal remotely. The ssh command is available on Linux,
MacOS, and the latest Windows 10 and 11 terminals (PowerShell). For
previous versions of Windows or PowerShell, SSH clients such as Putty can be used to
replace remote terminal and copy functions. The board can be accessed
via the terminal with the following command:
ssh mind@elk-pi.local
The default password is elk .
Once a connection is made, files such as the compiled Plugin,
configuration files, and dynamic libraries can be copied to the board
using scp (see scp) from the host computer:
scp -r /path/to/PluginName.vst3 mind@elk-pi.local:~/
scp libonnxruntime.so mind@elk-pi.local:~/
Once a VST plugin is copied to the board, it can be hosted via Elk Audio OS's DAW Sushi. Similarly to other DAWs, Sushi allows the creation of multiple tracks, where each can have one or more audio and MIDI inputs and outputs. Each track can have a chain of plugins, which are loaded as a dynamic library at runtime. However, differently from most other DAWs, the GUI code of the hosted plugins is neither shown nor called by Sushi, and the audio processing callback is executed on a hard real-time Xenomai thread for low latency processing.
For these reasons, executing the plugin prepared in the previous steps requires the configuration and execution of Sushi. Configurations are prepared in the form of JSON files. The following is a configuration file that will prompt Sushi to create a mono track with a single audio input and output, and to load the VST3 plugin "PluginName":
{
"host_config":{
"samplerate":48000
},
"tracks":[
{
"name":"main",
"mode":"mono",
"inputs":[
{
"engine_channel":1,
"track_channel":0
}
],
"outputs":[
{
"engine_channel":1,
"track_channel":1
}
],
"plugins":[
{
"uid":"PluginName",
"path":"/path/to/vst/PluginName.vst3",
"name":"arbitrary_plugin_name",
"type":"vst3x"
}
]
}
],
"midi":{
"cc_mappings":[]
}
}
In particular, the uid field should match exactly the VST3 unique identifier, which for JUCE corresponds to the project name (e.g., PluginName for PluginName.vst3). Alternatively, for VST2 plugins, the plugin block in the JSON configuration should contain only the following:
"path":"/path/to/vst/PluginName.so",
"name":"arbitrary_plugin_name",
"type":"vst2x"
Moreover, the configuration for a stereo track should use the following mode, inputs, and outputs field values:
"mode":"stereo",
"inputs":[ {
"engine_bus":0,
"track_bus":0
} ],
"outputs":[ {
"engine_bus":0,
"track_bus":0
} ]
More configuration file examples are provided in the project repository.
Once a configuration file is prepared, Sushi must be executed via the terminal by providing the audio driver type and the configuration file path:
sushi -r -c "/path/to/config.json"
where the -r option specifies to use Elk's RASPA low-latency front-end.
Users can add more options such as -multicore-processing=2 to allow Sushi to use more cores.
Moreover, & can be added at the end of the command to start Sushi in
the background and keep using the terminal. The background execution can
later be stopped with pkill sushi. If Sushi fails to start, errors in the
configuration or plugin can be identified in the log file /tmp/sushi.log. The next
section will provide a brief overview of diagnostic tools.
By default, Sushi logs events and errors at run-time to the file /tmp/sushi.log. The
logging level can be changed using thee -l flag. The log can show errors
such as having a plugin uid that does not match the actual VST3
unique-id or having an incorrect configuration format. Additionally, the -timing-statistics flag will prompt Sushi to log the fraction of CPU time available used
for processing. This is particularly relevant for
deep learning models meant to
be executed in real-time, with one or more inference operations per
audio block, as this will show if the plugin is reaching the allotted
time budget for each call or even surpassing it. The next section will
present a brief overview of different execution modes, including a few
considerations on how to deal with real-time tradeoffs and large models.
Notably, Elk Audio OS provides tools to diagnose real-time execution issues since any part of the code that is meant to execute in real-time must respect specific real-time safe programming rules [@bencina2014interfacing]. These rules include not allocating memory dynamically from the audio thread, not using locking mechanisms for concurrent memory access, or not waiting on lower-priority threads (e.g., querying system timers). In general, these rules can be summarized as "do not perform (on the audio thread) operations that have unbounded or unknown completion time". The inference libraries included were tested [@stefani2022comparison] and deemed real-time safe, but user code that is added to a plugin should respect the same rules.
Being Elk Audio OS a system based on a dual kernel, with audio
processing running on Xenomai real-time threads, it can be
straightforward to verify whether user code is violating real-time
safety and troubleshoot the problem. In fact, in Elk Audio OS, non-safe
operations in the audio callback will result in a mode switch, i.e.,
the system will give control back to the regular Linux kernel to handle
the unsafe operations and switch back to the Xenomai kernel. Up to
version 0.11.0 of Elk Audio OS, mode switches can be monitored by
looking regularly at the MSW column in the /proc/xenomai/sched/stat file. The following command will
update its output every three seconds:
watch -n 3 cat /proc/xenomai/sched/stat
 Example of a malfunctioning plugin, with multiple mode switches on different sushi threads
Example of a malfunctioning plugin, with multiple mode switches on different sushi threads
Version 1.0.0, which was released while this guide was being finalized,
requires using the evl ps -s command instead and looking at the ISW counter.
The number of mode switches must remain stable after the plugin startup, with one or two mode switches being allowed at startup if not audible as artifacts. In the case of repeated mode switches, their origin can be traced back to the original source code using the gdb debugger as follow:
- Running the GNU Debugger
gdbon the sushi executable for the current block size (default 64):gdb sushi_b64 - Setting
gdbto stop whenever theSIGXCPUsignal is sent by the program:catch signal SIGXCPU - Running Sushi with the debug-mode-sw flag:
r -r --debug-mode-sw -c config.json
Finally, the Elk Audio forum can be a useful source to find support and solve similar problems.
[Stefani, 2022a] D. Stefani and L. Turchet, “On the Challenges of Embedded Real-Time
Music Information Retrieval,” in Proceedings of the 25-th Int. Conf. on
Digital Audio Effects (DAFx20in22), vol. 3, Sept. 2022, pp. 177–184.
BibTeX
[Stefani, 2022b] D. Stefani, S. Peroni, and L. Turchet, “A comparison of deep learning inference engines for embedded real-time audio classification,” in Proceedings of the Digital Audio Effects Conference, 2022. BibTeX
26th of September 2023
Domenico Stefani