Communication
Language
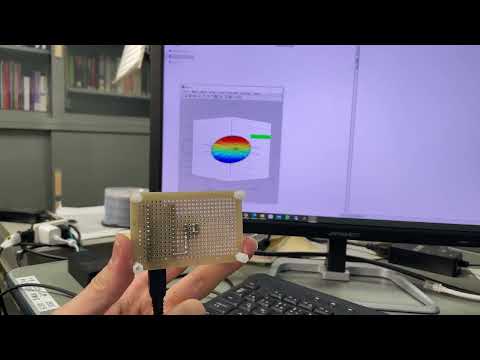
Quaternion based IMU with Extended Kalman Filter (EKF) for Teensy 4.0 .
BMX055 is employed as the 9-axis motion sensor to measure the angular velocities and the magnetic fields.
├─Calibration │ └─Mag_bias_log └─memo
- MCU board : teensy 4.0
- 9DoF motion sensor : BMX055 (https://akizukidenshi.com/catalog/g/gK-13010/)

- test.ino : main
- EKF.ino : Extended Kalman filter code to estimate attitude
- BMX055.ino : Code to measure the angular velocities and the magnetic fields via BMX055
- plot_3D_attitude.m : Code to plot the attitude estimated by IMU (Please modify the COM Port Number for your PC)
- plot_Mag_field.m in ./Calibration/Mag_bias_log/ : Calibration for a magnetic sensor from logged data; "Mag_bias_log.txt".
Data format of "Mag_bias_log.txt": [time s] [acc x m/s^2] [acc y m/s^2] [acc z m/s^2] [mag x a.u.] [mag y a.u.] [mag z a.u.]