This course helps students to acquire an understanding of the fundamentals of Mechatronics by constructing a simple type of mobile robot, such as a line tracer. The first half of the course develops students’ skill at using sensors and motors. Students apply these skills in the second half of the course, where they undertake robot development. The course concludes with students presenting their work and demonstrating their robots.
Repository contains my solutions to the assignments and projects of the course.
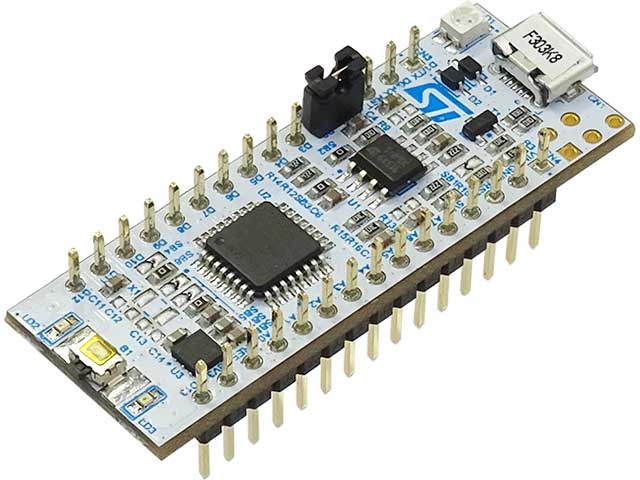
The base of the robot is a Nucleo-F303K8 board, which is a low-cost development board from STMicroelectronics. This is STM32F303K8T6 microcontroller based board, which has 64KB Flash memory, 16KB RAM, 72MHz CPU clock.
Programming was done using Keil Studio by ARM.
The final goal was to develop 2 robots:
- Line Follower Robot (using given design)
- Line Following Robot with Obstacle Avoidance (own design)
Track:


x6 Speed


х4 Speed
