Maple Bus emulation platform for interfacing to a Dreamcast controller port (client mode) or from a Dreamcast peripheral (host mode)
Update 2024-03-16: I let this project go a bit stale after running into a wall with HID gamepad support and not knowing where to take it from there. My personal goals have changed since I modified one of my Dreamcasts. I no longer care so much about interfacing a Dreamcast controller to USB. My focus has shifted towards creating peripherals to connect to a real Dreamcast - this library can go both ways :P Feel free to reach out if you encounter any issues or want to help out.
New goals for this project:
- Client mode
- Enable lightgun support (currently in progress)
- Interface with multiple USB devices (currently only Dualshock 4 controller interface works)
- Harden the USB host interface (hot-swap doesn't work at the moment)
Original goals for this project:
- Host mode
- Detect and interact with the following:
- Controller
- VMU
- Jump pack
- Setup USB HID Gamepad that supports vibration
- Setup some other USB device for VMU access
- Create whatever Linux/Windows drivers are necessary to communicate with all devices (probably will just use libusb)
- Interface with emulator such as Redream for controller, jump pack, and VMU
Refer to the releases page for current progress. Refer to the issues tab for things left to be implemented and known bugs.
To emulate a bespoke bus such as the Maple Bus on an MCU, one would usually either need to add extra hardware or bit bang the interface. This is not true with the RP2040 and its PIO. Think of it as several extra small processors on the side using a special machine language purpose-built for handling I/O. This means communication can be offloaded to the PIO and only check on them after an interrupt is activated or a timeout has elapsed. Check out maple_in.pio and maple_out.pio to see the PIO code.
Luckily, the RP2040 comes with 2 PIO blocks each with 4 separate state machines. This means that the RP2040 can easily emulate 4 separate controller interfaces, each at full speed!
Host mode allows you to connect up to 4 Dreamcast controllers to a PC over USB.
This should be implemented at your own risk! There is risk of damage to your PC USB ports, Pico, Dreamcast peripherals, or Dreamcast if circuitry is improperly handled, and I am not liable for any damage that may occur due to use of the following schematic or firmware (see LICENSE.md).

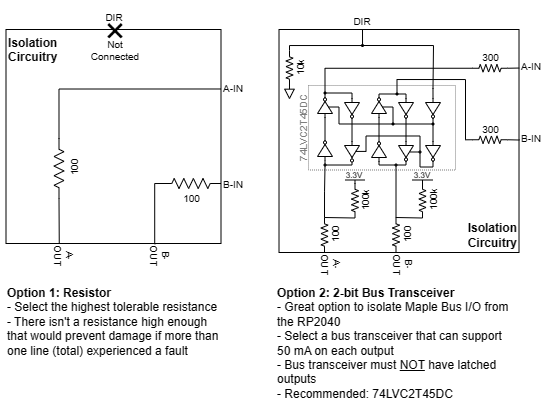
Select the appropriate isolation circuitry for your needs.
For reference, the following is the pinout for the Dreamcast controller port. Take note that many other sources found online refer to one of the ground pins as a connection sense, but the Dreamcast controller port module has both of these ground pins hard wired together. As such, this project doesn't rely on any such hardware sense line. Instead, the detection of a connected device is performed by polling the bus until a response is received, just as a real Dreamcast would.

Client mode emulates a single controller for use with a Dreamcast. This was added in as an extra feature for this project mainly to demonstrate that the MapleBus library may be used in either direction.
This should be implemented at your own risk! There is risk of damage to your PC USB ports, Pico, Dreamcast peripherals, or Dreamcast if circuitry is improperly handled, and I am not liable for any damage that may occur due to use of the following schematic or firmware (see LICENSE.md).

If running under Windows, install WSL and your desired flavor of Linux. I recommend using Ubuntu 20.04 as that is what I have used for development. Then the steps below may be run within your WSL instance.
- Install git, cmake, and gcc-arm-none-eabi compiler by running the following commands
sudo apt update
sudo apt -y install git cmake gcc-arm-none-eabi- (optional) In order to run and debug tests, install standard gcc compilers and gdb by running the following
sudo apt -y install build-essential gdb- Clone this repo then cd into the created directory
git clone https://github.com/Tails86/DreamcastControllerUsbPico.git
cd DreamcastControllerUsbPico- Pull down the pico SDK (this project now uses a fork of the SDK - it will no longer compile under the standard SDK)
git submodule update --recursive --initHint: if you have issues building, the easiest way to correct any submodule synchronization issue is to delete the ext/pico-sdk directory (ex: rm -rf ext/pico-sdk), and then re-run the above submodule update command.
- (optional) Build and run tests - this runs core lib unit tests locally
./run_tests.sh- Execute the build script
./build.shAfter build completes, binaries should be located under dist/. Pre-built release binaries may be found here.
This project may be opened in vscode. In vscode, the default shortcut ctrl+shift+b will build the project. The default shortcut F5 will run tests with gdb for local debugging. Open the terminal tab after executing tests with debugging to see the results.
Hold the BOOTSEL button on the Pico while plugging the USB connection into your PC. A drive with a FAT partition labeled RPI-RP2 should pop up on your system. Open this drive, and then copy the desired uf2 file for either host or client operation here. The Pico should then automatically load the binary into flash and run it. For more information, refer to the official Raspberry Pi Pico documentation.
- The LED on the Pico board may be used for quick status - when connected to USB, it should remain on when no button is pressed on any controller and turn off once a button is pressed.
- The included file
formatted_storage.binmay be used to delete and format a VMU attached to a controller when this project is used in host mode. For example, rename this file vmu0.bin and copy to DC-Memory drive when a VMU is inserted into the upper slot of Player 1's controller. - A serial device shows up on the PC once attached - open serial terminal (BAUD and other settings don't matter), type
h, and then press enter to see available instructions.
Refer to documentation here for general information about the Maple Bus.
The MapleBus class operates as the interface between the microcontroller's code and the PIO state machines, maple_in.pio and maple_out.pio.
Using 2 separate PIO blocks for reading and writing is necessary because each PIO block can only hold up to 32 instructions, and this interface is too complex to fit both read and write into a single block. Therefore, the write state machine is completely stopped before starting the read state machine for the targeted bus. Switching state machines is fast enough that there shouldn't be a problem. Testing showed the handoff always occurs within 1 microsecond after bringing the bus back to neutral. A device on the Maple Bus starts responding some time after 50 microseconds from the point of the bus going neutral after an end sequence. This ensures that a response is always captured.
The following lays out the phases of the state machine handled within the MapleBus class.

When the write method is called, data is loaded into the Direct Memory Access (DMA) channel designated for use with the maple_out state machine in the MapleBus instance. The DMA will automatically load data onto the TX FIFO of the output PIO state machine so it won't stall waiting for more data.
The first 32-bit word loaded onto the output DMA is how many transmission bits will follow. In order for the state machine to process things properly, (x - 8) % 32 == 0 && x >= 40 must be true where x is the value of that first 32-bit word i.e. every word is 32 bits long and at least a frame word (32 bits) plus a CRC byte (8 bits) are in the packet. This value needs to be loaded with byte order flipped because byte swap is enabled in the DMA so that all other words are written in the correct byte order. The rest of the data loaded into DMA is the entirety of a single packet as a uint32 array. The last uint32 value holds the 8-bit CRC.
A blocking IRQ is triggered once the maple_out state machine completes the transfer. This then allows MapleBus to stop the maple_out state machine and start the maple_in state machine.
A Direct Memory Access (DMA) channel is setup to automatically pop items off of the RX FIFO of the maple_in state machine so that the maple_in state machine doesn't stall while reading. Once the IRQ is triggered by the maple_in state machine, MapleBus stops the state machine and reads from data in the DMA.
The maple_out PIO state machine handles Maple Bus output. Data is generated by following the signal definition here.
The maple_in PIO state machine handles Maple Bus input. Some concessions had to be made in order to handle all input operations within the 32 instruction set limit of the input PIO block. The following are the most notable limitations.
- Only a standard data packet may be sampled
- The Maple Bus protocol has different types of packets depending on how many times B pulses in the start sequence, but those packets are ignored in this implementation
- The full end sequence is not sampled
- The packet length in the frame word plus the CRC are relied upon during post-processing in order to verify that the received packet is valid
The input PIO state machine will wait until A transitions LOW and then count how many times B toggles LOW then HIGH while making sure A doesn't transition HIGH until after B transitions HIGH. If the toggle count isn't 4, then the state machine keeps waiting. Otherwise, the state machine signals the application with a non-blocking IRQ and continues to the next phase where data bits are sampled.
For each bit, the state machine first waits for the designated clock to be HIGH before proceeding. Then once this line transitions to LOW, the state of the designated data line is sampled. State transitions of the designated data line are ignored except for the case when sensing the end sequence is required as described in the next section.
Whenever A is designated as the clock, the input PIO state machine will detect when B toggles HIGH then LOW while A remains HIGH. It is assumed that this is the beginning of the end sequence since this is not a normal behavior during data transmission. The state machine will then block on an IRQ so that the application can handle the received data.
0xPrefix: The following value is hex format- Byte: Data consisting of 8 consecutive bits
- DMA: Direct Memory Access
- LSB: Least Significant Byte
- LSb: Least Significant bit
- MSB: Most Significant Byte
- MSb: Most Significant bit
- Nibble: Data consisting of 4 consecutive bits
- PIO: Programmable Input/Output
- SDCK: Serial Data and Clock I/O
- Word: Data consisting of 32 consecutive bits
Maple Bus Resources
https://archive.org/details/MaplePatent/page/n7/mode/1up
http://mc.pp.se/dc/maplebus.html and http://mc.pp.se/dc/controller.html
https://tech-en.netlify.app/articles/en540236/index.html
https://www.raphnet.net/programmation/dreamcast_usb/index_en.php
https://web.archive.org/web/20100425041817/http://www.maushammer.com/vmu.html
https://segaretro.org/History_of_the_Sega_Dreamcast/Development