Gen2.1.8 (ex2.10) (I seem to have found a new board) #25
Comments
|
first is slave second is master |
|
Added it to this repo. |
|
|

|
Great! |
|
I'm pretty sure its c8, but I will confirm when I get home. |
|
It is GD32F130 c8 |
|
|

|
Your CLK pin is wrong:
Try to trace some led pins - good for debugging like config.h:
Cheap CC dcdc converters for a 10s liion battery : "LM2596 60V" https://www.aliexpress.com/item/1005004225291490.html Or a 12 or 24V battery or some notebook power supply that outputs somewhere from 14V to 21V. Unfortunately i do not find 12 day shipping offers for these items on Aliexpress. Or you watch my latest youtube videos and buy https://www.aliexpress.com/item/1005004966830126.html bye. |

|
Sorry for the confusing labels, I did know that that was the clock pin. The green yellow and blue traces are the mosfet control |
|
have modfied your pin tracins and added it to the Schematics_2.10 folder.
|

|
So by chance I landed with this layout too. |

|
Great. And mostly, you have a led module with 2 led like the one you traced, and a module with 3 led. So i guess that PA12 would control the orange led on that other led-module. I will make a defines-2_10.h ready for you tomorrow. Here in germany it now is 21:04 and i will go to bed soon. |
|
@Tommyboi2001 , what happened to you ?? |
|
I see that the little led transistors are on the led module, not the mainboard. Then these pins could probably also be used for serial communication.. |
|
I will reverse it all soon. slave board too, comnnection, too. |
|
And some slave details |

|
Tommorow or next day I will prepare safe power supply and install keil. |
|
Onoff button and hold pin will be important. So try and error might be faster.. |
|
I think it is like below pic. Is it sharing same layout like any 2.x? or it's different completely?
|

|
Okay i have added the config_2-10.h and also compiled some test binaries: https://github.com/RoboDurden/Hoverboard-Firmware-Hack-Gen2.x/tree/main/HoverBoardGigaDevice/BinariesToTest The config.h is still set to the 2.10 layout. As the colors of the hall cable are all balck, the ordering could be reverse :-/ Still missing is the buzzer pin. I guess it is the little transistor right to it: I have defined the led colors according to the slave led module with its 3 leds. Looks like the 2 color led panel of the master has different pins for red and green. I guess you can plugin the 3 led panel into the master as well. All test binaries are compiled with the TEST_HALL2LED define so the three led should rotate when the motor spins with always two led overlapping. There are 5 mcu pins that are still free and can do analog input:
So i have kept the 2.0 defines: Check the log data when you run a uart binary. the battery voltage should vary when you increase/decrease the cc power supply. Current should increase when you put a hand on the motor. There are two dual opamp chips on board:
The left one probably is for two lowside gate currents of the two left phases. They will be important for the SimpleFOC firmware. Have fun. |


|
Great! |

|
PF0 could be the buzzer. P.S as i have said, i do not really like to compile binaries when you do not test them yet anyway. |
|
So the current status is that:
I can not see any communication, so I suppose uC will not rorate motor until receives frame witg requested speed etc.. Any suggestion (chaged rx with tx done... )? I will look if I did not any mistake (again) |
|
first try the master_dummy to verify that the 6 bldc mosfet outputs and the 3 three hall inputs are correct. remote serial should be connected to If you have a pocket DSO, you can look if PB6 is sending some data. (And if ESP32 pin 37 is sending data.) If board is not holding power then your pin tracing is wrong: |
|
for the time being loaded hoverboard 2.10 master Dummy.bin and basically the same status. (except no sound, but you added buzzer to UART file, so it is ok) |
|
Yes, with only wrong hall pins or hall order, the motor would stutter or be stuck after a little jump and some current being drawn. If you had Keil installed, you could compile a 2.0_master_dummy, verify it to work and than only change I habe uploaded a |
|
I had some time and looked on some details, and in fact there are small test points called like on picture below, so it has to be accurate. (current measure pins as well are marked on board) . there is also BRK signal,whatever it can be (breaking?). Need to look on that more in details too? later will look on "power on" circuitry. why it do not want to hold power.
|

|
Additionally there is no "switch on" circuitry on slave. |
|
yes it is quite common that the slave board does not have a dcdc step down unit but gets the 12V via the mastersalve cable. the 6 mosfet pins are very restricted by hardware. That is why most layouts have this Try to get the uart working to get some serial log output. I have uploaded a |
|
a pocekt dso is a nice thing. Check the delivery time of these offers. If it is 5 days or less then it might be shipping from Poland: https://www.aliexpress.com/item/1005005644784105.html Oh finally a two channel oscilloscope below 40€: https://www.aliexpress.com/item/1005006019697163.html |
|
I will think on that, maybe have something at work in workshop. |
|
these pullups are physical resistor or internal pullup in GD? will look on that... |
|
Yes, it also came to me just now, that you could put a 10k resistor in the tx lines from 2.10. |
|
will try that tommorow. good night ! |
|
The idea is like yours: the pullups of 2.10 are to small and therefore the tx line can not be pulled to gnd by the 2.0 boards. one resistor might also work: Good night to Poland :-) |


|
Better take a 100k potentiometer so you can test a resistance from 1k - 100k :-) |
|
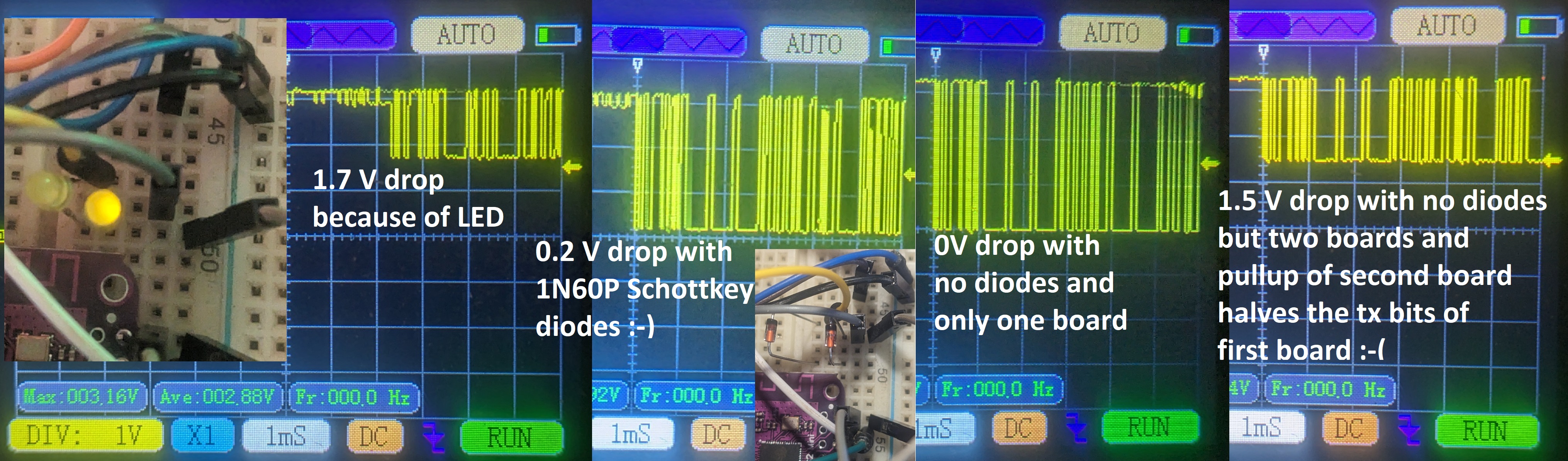
Yes the pullup resistors on the hover.tx lines seem to be the problem. 2.10 may have no resistors in the line but direct connection from mcu to uart header: My 2.13 has no restistors in the line for sure: The inline resistors of the 2.0 boards from a voltage divider with the many pullup-resistors :-( Therefore the 2.0 tx output can not pull the esp.rx down to gnd anymore :-( I tried to disable the mcu internal pullup but unfortunately it did have no effect: @pacraf , you can add this change to your setup.c file and see if it helps. Two 3mm yellow led did prevent the non sending board to pullup the sending board so badly that ESP32 would not detect the bytes. But the yelllow leds did also add a voltage drop of 1.7V. Still the ESP32 did read the 1.7V as zero and the communication worked with two boards connected (a 3mm green led did not work). So i replaced the yellow led with little Schottky diodes and these only produced a voltage drop of about 0.2 V :-) I now think, the UartBus needs Schottky diodes like the 1N60P https://www.aliexpress.com/item/1005004104012198.html
|



|
@pacraf , if you want to build a huge 4wheeler lawn mover i would suggest an ESP32-CAM https://www.aliexpress.com/item/4000844206042.html (Color: CAM-MB With Antenna) You could easily (i think) add hoverboard speed/steer levers to |

|
As an aside, I used a drone FPV camera+TX & goggles on my outdoor rover
when testing. This was really nice because it was 100% 'out of band' with
anything else to do with the rest of it and did one job. It's more
expensive than an ESP32-CAM, which I've also used, but far less flaky/laggy.
…On Fri, 3 Nov 2023 at 10:08, Robo Durden ***@***.***> wrote:
@pacraf <https://github.com/pacraf> , if you want to build a huge
4wheeler lawn mover i would suggest an ESP32-CAM
https://www.aliexpress.com/item/4000844206042.html (Color: CAM-MB With
Antenna)
https://lastminuteengineers.com/getting-started-with-esp32-cam/
You could easily (i think) add hoverboard speed/steer levers to
[image: esp32cam]
<https://camo.githubusercontent.com/f5cd94052b2c14932b06776b15f71f4b64f0e5861e95d9f2736b9ad4926c23ff/68747470733a2f2f6c6173746d696e757465656e67696e656572732e636f6d2f77702d636f6e74656e742f75706c6f6164732f696f742f45535033322d43414d2d4c6976652d566964656f2d53747265616d696e672e6a7067>
—
Reply to this email directly, view it on GitHub
<#25 (comment)>,
or unsubscribe
<https://github.com/notifications/unsubscribe-auth/ABOP5GBUOVT7Y3YCK7SV4A3YCS7CHAVCNFSM6AAAAAA46HJJE6VHI2DSMVQWIX3LMV43OSLTON2WKQ3PNVWWK3TUHMYTOOJSGE3DKMZRGE>
.
You are receiving this because you are subscribed to this thread.Message
ID: <RoboDurden/Hoverboard-Firmware-Hack-Gen2.x/issues/25/1792165311@
github.com>
--
Nick Reynolds - 950SM|620SC
|
|
I like the Esp32Cam approach because it would already be halfway to an autonomous lawn mover. The cheap camera would only be the intermediate step and to overview the autonomous route.. |
|
Oh yes the drone stuff is only to watch what it's doing OOB. I've been
using ESP8266/32 based stuff for the actual control.
…On Fri, 3 Nov 2023 at 11:05, Robo Durden ***@***.***> wrote:
I like the Esp32Cam approach because it would already be halfway to an autonomous lawn mover. The cheap camera would only be the intermediate step and to overview the autonomous route..
I do not like rc-remote control at all because it will restrict the project to the usual "stupid fun project"..
The Esp32Cam example arduino code might make it very easy to add remote control via two levers or mouse touches on the smartphone..
—
Reply to this email directly, view it on GitHub, or unsubscribe.
You are receiving this because you commented.Message ID: ***@***.***>
--
Nick Reynolds - 950SM|620SC
|
|
Okay i have added MASTER control via REMOTE_UARTBUS :-) 4Wheeler.ino: I also resolved the bugs that slave will not shutoff and REMOTE_UART now running smoothly again. |
|
Hey Robo, it gets complicated as slave 2_10 needs 12V from master. this stays. |

|
Maybe you find 5V on one of the many 2pin headers of 2.10. Then it would be easier to make the 2.10 the masters and 2.0 the slaves. But as you already have the 4 ids uartBus setup ready, it would be nice if you would test my latest firmware+4wheeler.ino. It would be great for me if you finally proove that 4 slaves on my UartBus are possible. With (Schottky) diodes i am very hopeful. |
|
ok, first with potentiometer. 10k installed like your diagram (so both 2_10 are hanging on this pot10k) |
|
as I see it more carefully, it is not as I said. It is not possible to set potentiometer to position where all are talking back. |
|
do you think really shottky will do the job? I have only from shottky family SB560. |
|
Yes i am confident that shottky diode will be successfull. SB560 are the bigger ones for 3+ A, so they won't fit into a dupont female cable/protoype board.
Did you indeed mean NOT possible ? |
|
oh yes it did the job. |
|
Awesome :-)) |
|
Hell yeah! shotky machine here |

{kind=link}
|
Robo, with pot10k it was NOT possible to find position where all were able to talk back. if pot is in some mean value (let's say 5k , 50% something like this) - you only see garbage , no 2_0, no 2_10 messages. you decrease value more , then appears messages from 2_10 so there is NO posistion of potentiometer where all 4 talk back |
|
Robo, Thank you for all your time and effort with this 2_10 case. |
|
@pacraf : https://youtu.be/NgEQbECmsRk :-) |
|
Haha. nice. sure, publish that cable mess. ;) |
|
:-) |
|
Hey Robo, my 4wheeler test rig first drive... |
The text was updated successfully, but these errors were encountered: