Tutorial 1: Set up Unity package
- Tutorial 1: (This page): Set up the Unity package
- Tutorial 2: Set up the ROS package
- Tutorial 3: Video and RGBD (e.g. Kinect)
- Tutorial 4: Extending to a new robot
These tutorials cover how to set up the Unity and ROS portions of this teleoperation project. While some of these tutorials can be completed independently, for the full system you will need:
- A windows computer with a VR headset (e.g. HTC Vive), and steam. You should have completed the VR room setup and have a basic understanding of how to use the VR headset
- A linux machine with ROS. This can be a virtual machine running on Windows
- (Optional) A Kinect or other RGBD camera. An RGB camera can also be used
- (Optional) A Robot that can accept commands from ROS
This first tutorial will cover:
- Installing Unity
- Installing the unity project
- Viewing the robot in VR
To complete this section you will need a windows computer with a VR headset.
Time: 30 min (depending on download speeds)
Install Unity onto a windows computer with a VR headset. The individual plan is fine (as long as you meet the criteria). Follow the unity installation instructions, which will involve creating an account and activating a license.
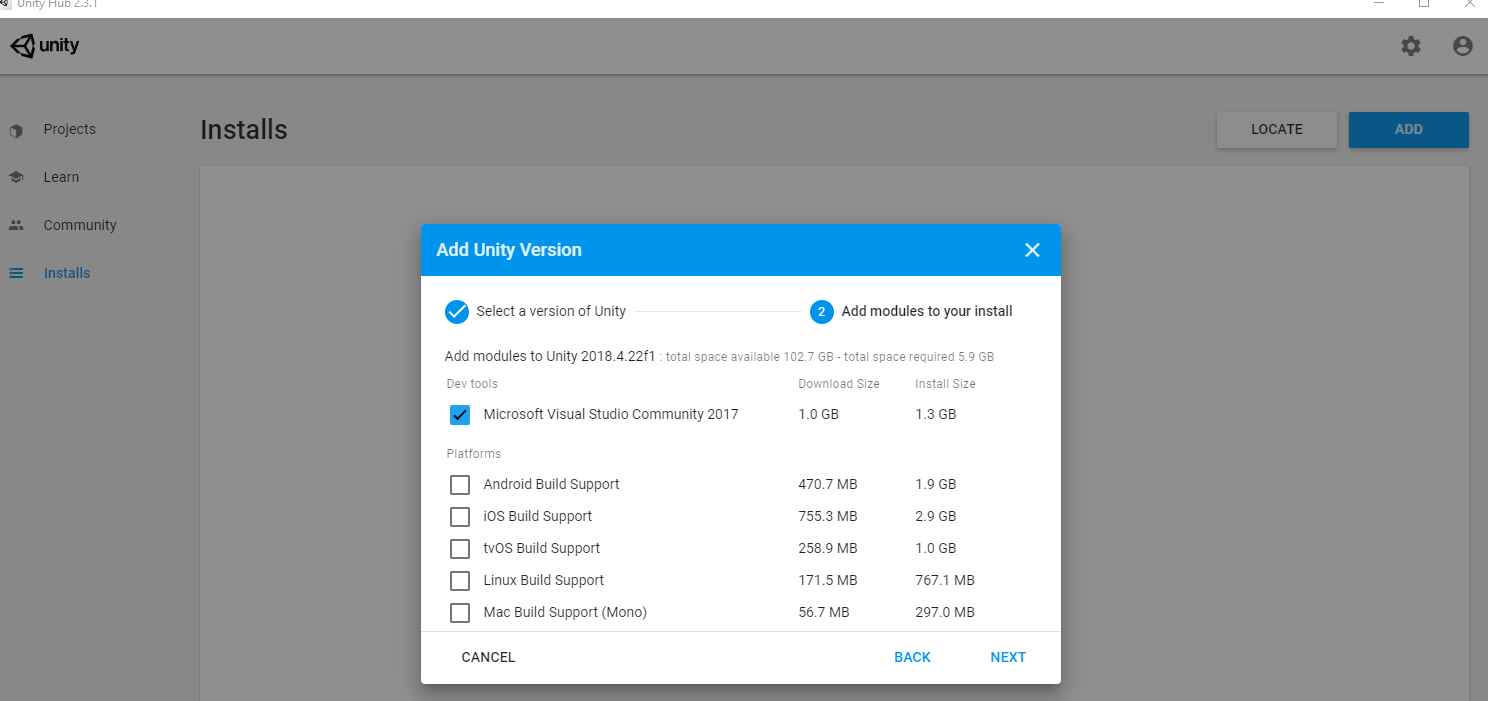
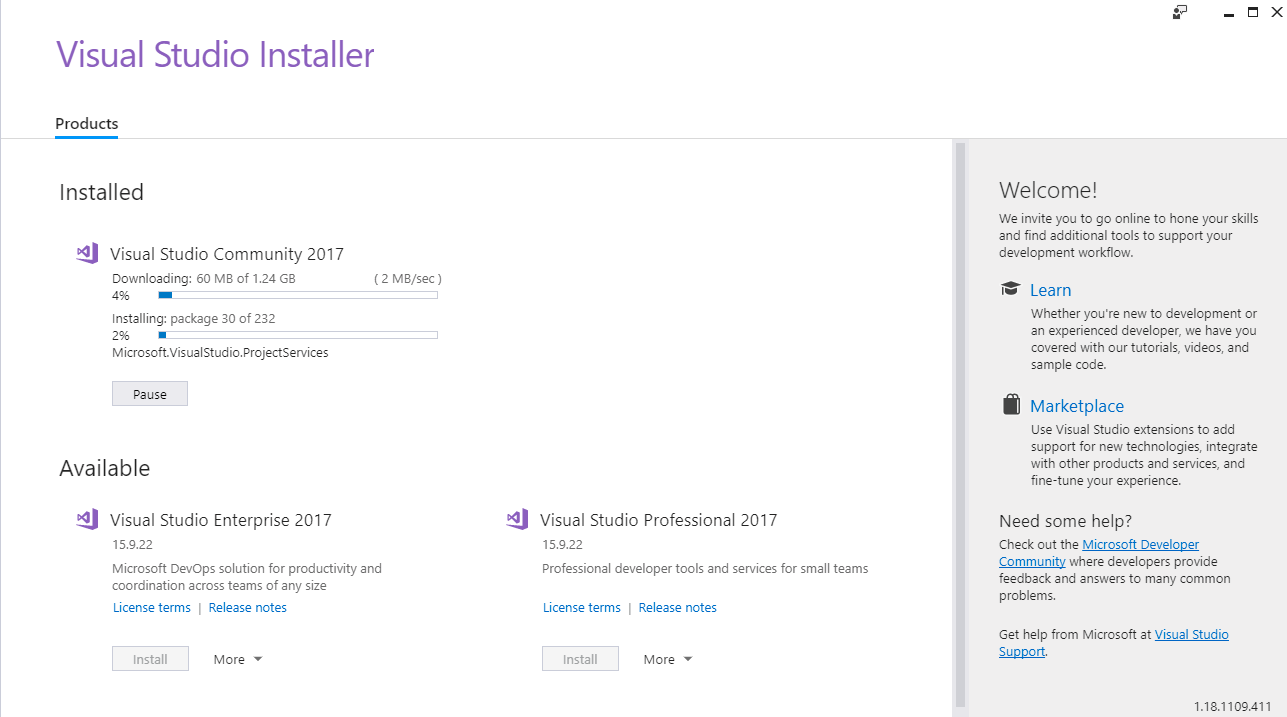
Install the Unity Editor, using the Installs tab. The project originally used 2018.4 (the latest LTS release), but so far all later versions have been compatible. This will also automatically install visual studio.
After installation you should see a blank projects page.
Clone this repo and open it as a unity project from Unity Hub.
Initially, Unity will complain about missing Prefab assets. Install the "Steam VR" plugin (Asset Store -> Search for "SteamVR", Download and import SteamVR)
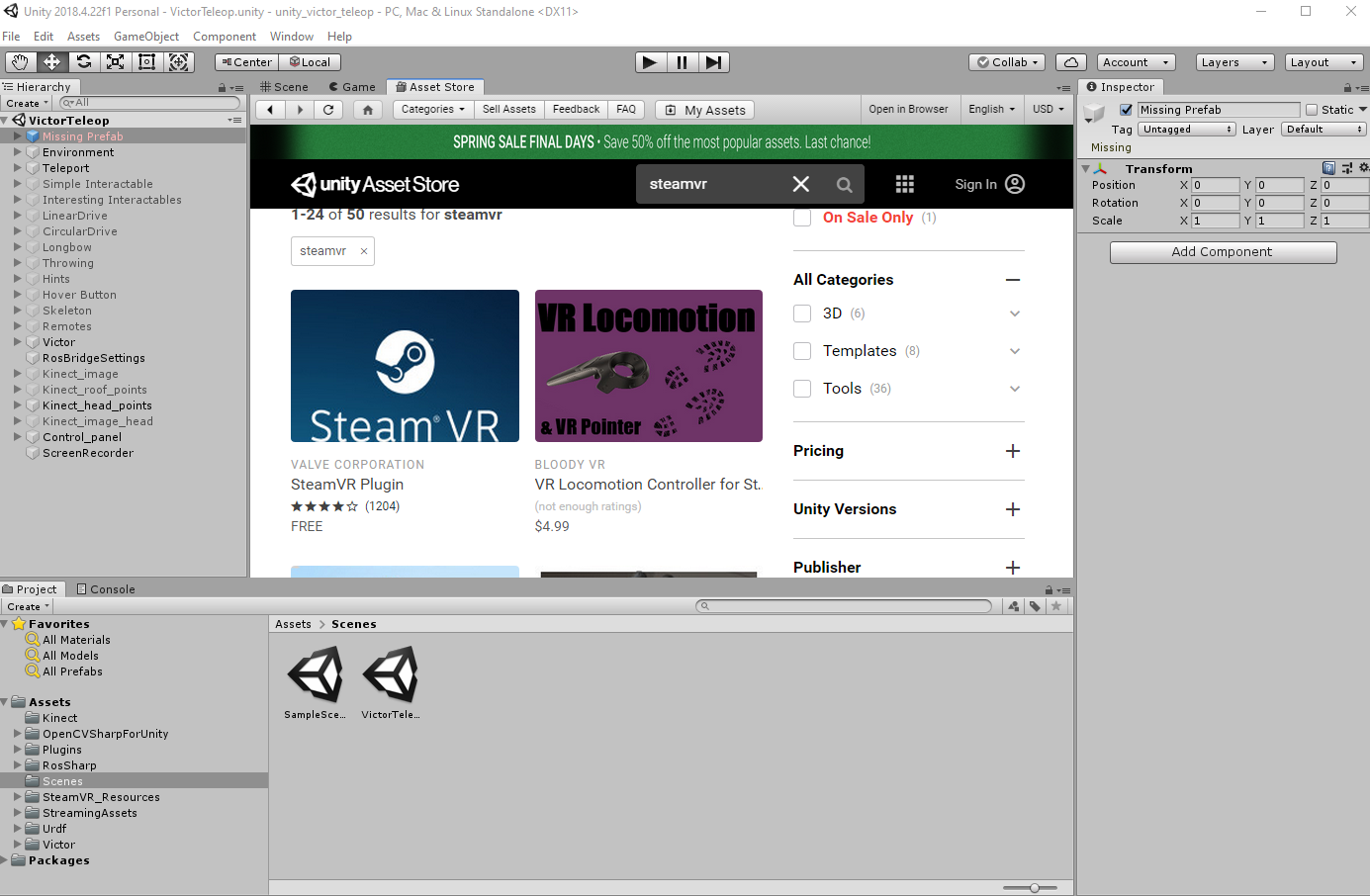
After installing the SteamVR plugin, select the VictorTeleop Scene (Assets -> Scenes). You should see a Robot and a control panel.
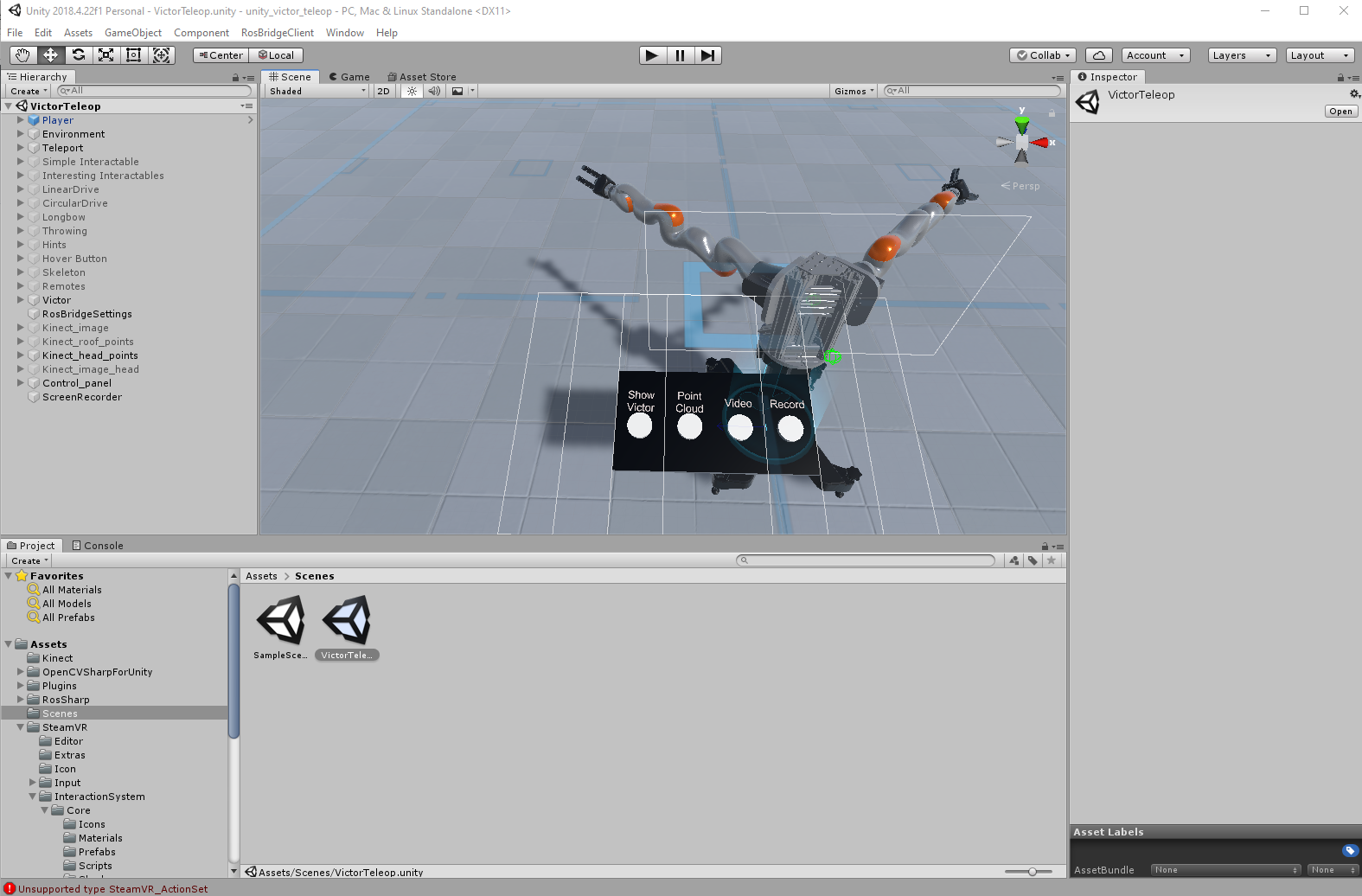
At this point you can "Play" The project and move around the VR world. You can press the buttons and grab the robot's hands. However, it is not very interesting yet. We have not set up a controller for the robot, so the robot will not move. We also haven't set up any sensors, so there is no input to the robot.
See the next tutorial