AGS-Mesh: Adaptive Gaussian Splatting and Meshing with Geometric Priors for Indoor Room Reconstruction Using Smartphones
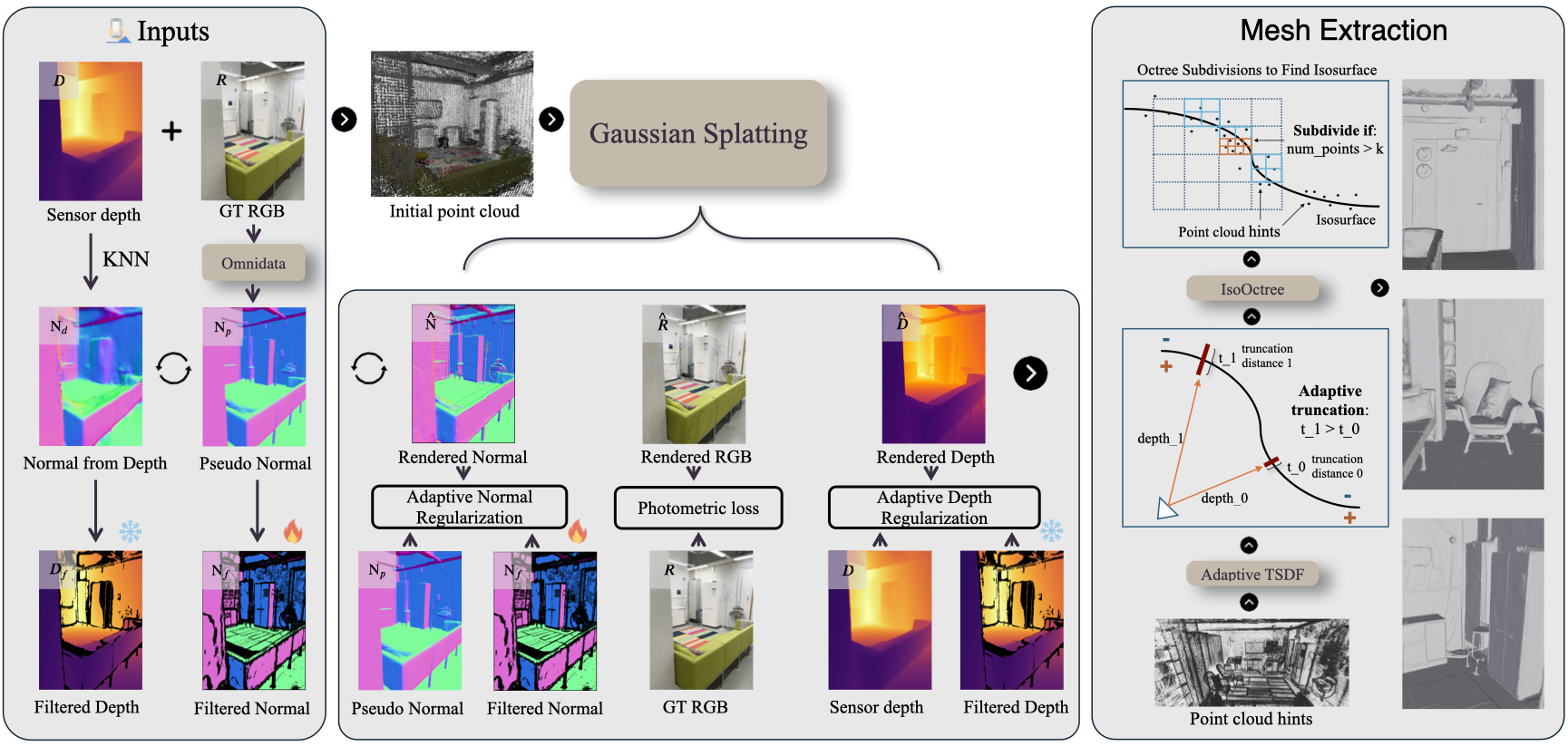
We address the problem of mesh reconstruction for indoor scenes by incorporating RGB images and sensor depth into the Gaussian Splatting regularization process. To mitigate the effects of noisy sensor depth data and pseudo-normals that lack multi-view consistency, we adaptively integrate these geometric priors during the Gaussian Splatting training. Additionally, we implement the IsoOctree mesh extraction method to enhance the reconstruction process.
Note: Our implementation have been integrated into DN-Splatter, a framework developed by our group, to ensure ease of use. For more details, please visit https://github.com/maturk/dn-splatter.
# download
git clone https://github.com/XuqianRen/AGS_Mesh.git --recursive
#create a new environment
conda env create --file environment.yml
conda activate ags_mesh
# install additional package:
pip install fvcore
pip install --no-index --no-cache-dir pytorch3d -f https://dl.fbaipublicfiles.com/pytorch3d/packaging/wheels/py38_cu118_pyt201/pytorch3d-0.7.4-cp38-cp38-linux_x86_64.whl
# install IsoOctree library
git clone https://github.com/SpectacularAI/IsoOctree.git --recursive
cd IsoOctree
../install_IsoOctree.sh
cd ..# First generate depth mask based on depth normal and pre-train normal consistency check:
python depth_normal_consistency.py --data_dir <dataset_path> --transform_name <transformation script.json>
# this command will generate depth_normals and depth_normals_mask for the RGBD sequences
## note: we put pose in transform.json for scannetpp iphone sequences, so please first run dn-splatter with scannetpp dataset to get the transform.json
# Second, please follow dn-splatter main branch to generate the pre-train normal
Commandline arguments you should adjust accordingly to generate depth mask
--data_dir # path to the sequence folder
--transform_name # transforms.json or transformation_colmap.json fileTo train a scene, simply use
# currently we only support Scannetpp and MushRoom dataset
python train.py -s <path to MuSHRoom or Scannetpp dataset>
--model_path <output_path> --depth_supervision --normal_supervisionpython render.py -m <output_path> -s <path to MuSHRoom or Scannetpp dataset> --iteration 30000 --skip_mesh --skip_trainTo export a mesh within a bounded volume, simply use
python render.py -m <path to pre-trained model> -s <path to COLMAP dataset> \
--iteration 30000 --voxel_size 0.01 --depth_trunc 10 --sdf_trunc 0.03 --skip_train --skip_testCommandline arguments you should adjust accordingly for meshing for bounded TSDF fusion, use
--voxel_size # voxel size
--depth_trunc # depth truncation
--sdf_trunc # sdf truncation distanceTo export a mesh with IsoOctree based method, use:
# first export rendered rgb, depth and normal of train set:
python render.py -m <output_path> -s <path to MuSHRoom or Scannetpp dataset> --iteration 30000 --skip_mesh --skip_test
# get mesh with IsoOctree-based method
python isooctree.py <output_path/train/ours_iteration/> --transformation_path <pose_json_path> \
--tsdf_rel 0.03 --output_mesh_file <output_path/output.ply> --subdivision_threshold=100
# we also provide a version of IsoOctree that better support bad depth, run with
python isooctree_dn.py <output_path/train/ours_iteration/> --transformation_path <pose_json_path> \
--tsdf_rel 0.03 --output_mesh_file <output_path/output.ply> --subdivision_threshold=100Commandline arguments you may need to adjust accordingly for meshing to get better quality
--tsdf_rel # TSDF fusion tuning param
--disable_normals # do not use normals in TSDF fusion
--tsdf_trunc # sdf truncation distanceTo evaluate reconstructed mesh with reference mesh:
# mushroom dataset
python eval/eval_mesh_mushroom.py --gt_mesh_path <path to dataset scene> --pred_mesh_path <path to output.ply> \
--output <output path>
# scannetpp dataset
python eval/eval_mesh.py --gt_mesh <path to gt mesh> --pred_mesh <path to predicted mesh> --dataset_path <path to scannetpp sequence> --transformation_file <path to transforms.json>To evaluate NVS quality, run
python eval/eval_nvs.py --data <render folder path>Train with MuSHRoom/Scannetpp dataset:
# MuSHRoom
python train.py -s dataset/room_datasets/vr_room/iphone/ --model_path output/mushroom/vr_room --depth_supervision --normal_supervision
# Scannetpp
python train.py -s dataset/scannetpp/data/8b5caf3398/iphone --model_path output/scannetpp/8b5caf3398/ --depth_supervision --normal_supervision
# export rendered images of test set
python render.py -m output/mushroom/vr_room -s dataset/room_datasets/vr_room/iphone/ --iteration 30000 --skip_mesh --skip_train
# evaluate nvs
python eval/eval_nvs.py --data output/MuSHRoom/vr_room/test/test/ours_30000
# use isooctree-based mesh extraction
## first get rendered training image
### mushroom
python render.py -m output/mushroom/vr_room -s dataset/room_datasets/vr_room/iphone/ --iteration 30000 --skip_mesh --skip_test
### scannetpp
python render.py -m output/scannetpp/8b5caf3398 -s dataset/scannetpp/data/8b5caf3398/iphone --iteration 30000 --skip_mesh --skip_test
## get mesh with IsoOctree-based method
### mushroom
python isooctree.py output/MuSHRoom/vr_room/train/ours_30000/ --transformation_path dataset/room_datasets/vr_room/iphone/long_capture/transformations_colmap.json --tsdf_rel 0.03 --output_mesh_file output.ply --subdivision_threshold=100
### scannetpp
python isooctree.py output/scannetpp/8b5caf3398/train/ours_30000 --transformation_path dataset/scannetpp/data/8b5caf3398/iphone/transforms.json --tsdf_rel 0.03 --output_mesh_file output.ply --subdivision_threshold=100
## evaluate isooctree mesh
### mushroom
python eval/eval_mesh_mushroom.py --gt_mesh_path dataset/room_datasets/vr_room --pred_mesh_path output.ply --output ./
### scannetpp
python eval/eval_mesh.py --gt_mesh dataset/scannetpp/data/8b5caf3398/scans/mesh_aligned_0.05.ply --pred_mesh output.ply --dataset_path dataset/scannetpp/data/8b5caf3398/iphone --transformation_file dataset/scannetpp/data/8b5caf3398/iphone/transforms.json
# or use the bounded mesh extraction from 2dgs
## mushroom
python render.py -m output/mushroom/vr_room -s dataset/room_datasets/vr_room/iphone/ --iteration 30000 --voxel_size 0.01 --depth_trunc 10 --sdf_trunc 0.03 --skip_train --skip_test
## scannetpp
python render.py -m output/scannetpp/8b5caf3398 -s dataset/scannetpp/data/8b5caf3398/iphone --iteration 30000 --voxel_size 0.01 --depth_trunc 10 --sdf_trunc 0.03 --skip_train --skip_test
We also release the code that implemented to DN-Splatter as a plug-in module, please refer to the project: https://github.com/maturk/dn-splatter for more details.
If you find this work useful in your research, consider citing AGS-Mesh:
@article{ren2024ags,
title={AGS-Mesh: Adaptive Gaussian Splatting and Meshing with Geometric Priors for Indoor Room Reconstruction Using Smartphones},
author={Ren, Xuqian and Turkulainen, Matias and Wang, Jiepeng and Seiskari, Otto and Melekhov, Iaroslav and Kannala, Juho and Rahtu, Esa},
journal={arXiv preprint arXiv:2411.19271},
year={2024}
}