This repo is used to easily evaluate pre-trained Visual Place Recognition methods, and is released as part of the ICCV 2023 EigenPlaces paper. All train state-of-the-art models since 2016 are supported (namely NetVLAD, AP-GeM, SFRS, Conv-AP, CosPlace, MixVPR, EigenPlaces, AnyLoc, SALAD, EigenPlaces-indoor and SALAD-indoor) and it uses the weights released by the respective authors.
To see the results of these methods on a large number (14!) of VPR datasets check out the EigenPlaces paper.
[ICCV 2023 Open Access] [ArXiv] [Cite/BibTex]
Simply run this to try a method on a (unlabeled) toy dataset contained in assets. This is super lightweight and will take a few seconds even running on a CPU of a laptop.
git clone --recursive https://github.com/gmberton/VPR-methods-evaluation
cd VPR-methods-evaluation
python3 main.py --method=cosplace --backbone=ResNet18 --descriptors_dimension=512 \
--database_folder=toy_dataset/database --queries_folder=toy_dataset/queries \
--no_labels --image_size 200 200 --num_preds_to_save 3 \
--log_dir toy_experiment
which will generate images like this within the logs/toy_experiment visual predictions for each query like this one

You can also use this on your own dataset (or any two directories) simply changing the paths parameters.
The code is designed to be readily used with our VPR-datasets-downloader repo, so that using a few simple commands you can download a dataset and test any model on it. The VPR-datasets-downloader code allows you to download multiple VPR datasets that are automatically formatted in the same format as used by this repo.
The format needed by this repo to compute recalls is that each image should use as filename path/to/image/@UTM_east@UTM_north@whatever@.jpg
mkdir VPR-codebase
cd vpr-codebase
git clone https://github.com/gmberton/VPR-datasets-downloader
cd VPR-datasets-downloader
python3 download_st_lucia.py
cd ..
git clone --recursive https://github.com/gmberton/VPR-methods-evaluation
cd VPR-methods-evaluation
python3 main.py --method=cosplace --backbone=ResNet18 --descriptors_dimension=512 \
--database_folder=../VPR-datasets-downloader/datasets/st_lucia/images/test/database \
--queries_folder=../VPR-datasets-downloader/datasets/st_lucia/images/test/queries
This should produce this as output R@1: 98.8, R@5: 99.7, R@10: 99.9, R@20: 100.0, which will be saved in a log file under ./logs/
You can easily change the paths for different datasets, and you can use any of the following methods: NetVLAD, AP-GeM, SFRS, CosPlace, Conv-AP, MixVPR, EigenPlaces, AnyLoc, SALAD, EigenPlaces-indoor and SALAD-indoor. Note that each method has weights only for certain architectures. For example NetVLAD only has weights for VGG16 with descriptors_dimension 32768 and 4069 (with PCA).
NB: make sure to use the git clone --recursive, otherwise some third party (like AP-GeM) models can't be used.
Predictions can be easily visualized through the num_preds_to_save parameter. For example running this
python3 main.py --method=cosplace --backbone=ResNet18 --descriptors_dimension=512 \
--num_preds_to_save=3 --log_dir=cosplace_on_stlucia \
--database_folder=../VPR-datasets-downloader/datasets/st_lucia/images/test/database \
--queries_folder=../VPR-datasets-downloader/datasets/st_lucia/images/test/queries
will generate under the path ./logs/cosplace_on_stlucia/*/preds images such as
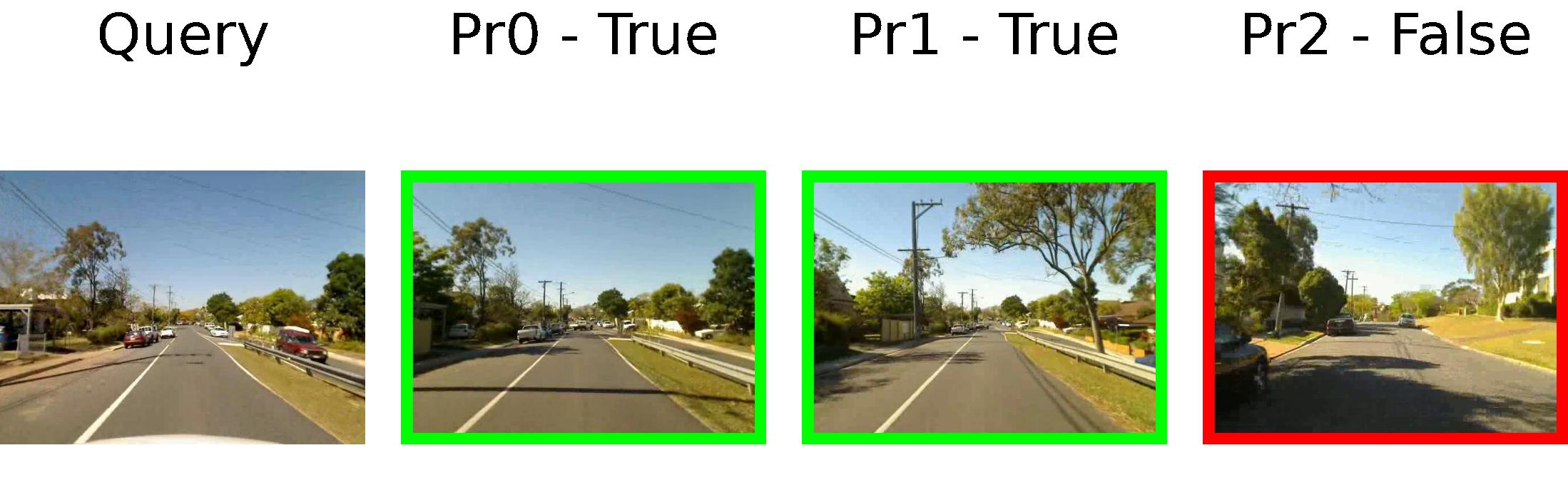
Given that saving predictions for each query might take long, you can also pass the parameter --save_only_wrong_preds which will save only predictions for wrongly predicted queries (i.e. where the first prediction is wrong).
If you use this repository please cite our paper
@inproceedings{Berton_2023_EigenPlaces,
title={EigenPlaces: Training Viewpoint Robust Models for Visual Place Recognition},
author={Berton, Gabriele and Trivigno, Gabriele and Caputo, Barbara and Masone, Carlo},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
year={2023},
month={October},
pages={11080-11090}
}
Kudos to the authors of NetVLAD, AP-GeM, SFRS, CosPlace, Conv-AP, MixVPR, EigenPlaces, AnyLoc, SALAD, EigenPlaces-indoor and SALAD-indoor for open sourcing their models' weights. The code for each model has been taken from their respective repositories, except for the code for NetVLAD which has been taken from hloc. Make sure to cite them if you use each model's code.