v4.0.1: Soft Actor-Critic
This release adds a new algorithm: Soft Actor-Critic (SAC).
Soft Actor-Critic
-implement the original paper: "Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor" https://arxiv.org/abs/1801.01290 #398
- implement the improvement of SAC paper: "Soft Actor-Critic Algorithms and Applications" https://arxiv.org/abs/1812.05905 #399
- extend SAC to work directly for discrete environment using
GumbelSoftmaxdistribution (custom)
Roboschool (continuous control) Benchmark
Note that the Roboschool reward scales are different from MuJoCo's.
| Env. \ Alg. | SAC |
|---|---|
| RoboschoolAnt | 2451.55 graph |
| RoboschoolHalfCheetah | 2004.27 graph |
| RoboschoolHopper | 2090.52 graph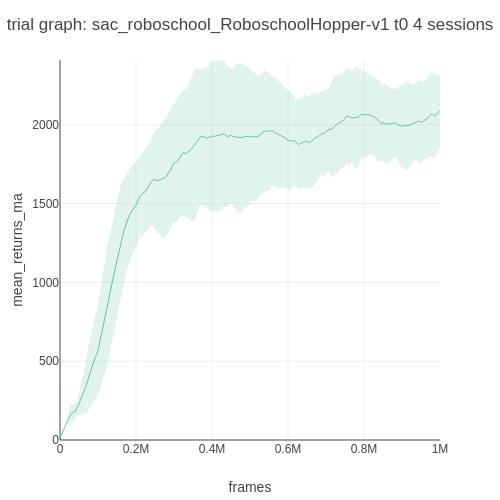 |
| RoboschoolWalker2d | 1711.92 graph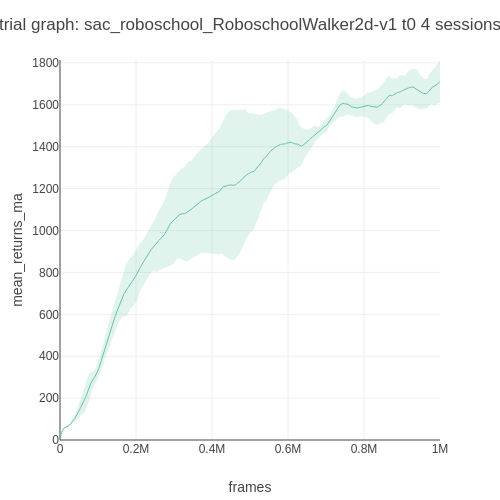 |
LunarLander (discrete control) Benchmark
 |
 |
| Trial graph | Moving average |