config_uart
本文所有配置是基于Raspbian 2019-04-08系统进行编写。下载链接
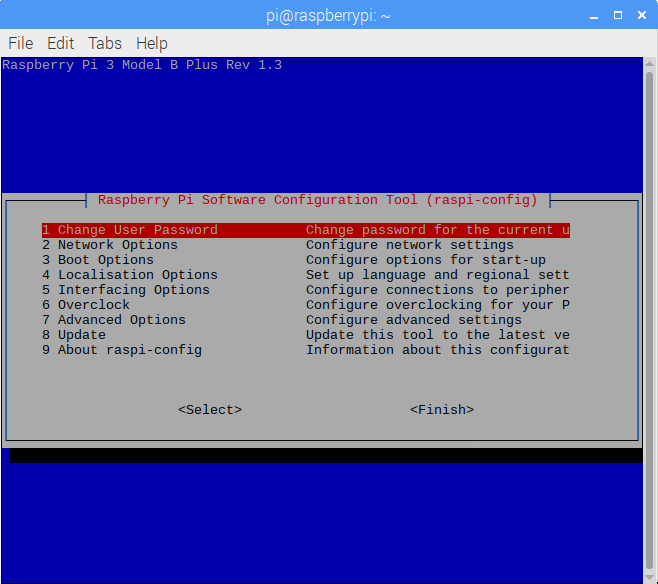
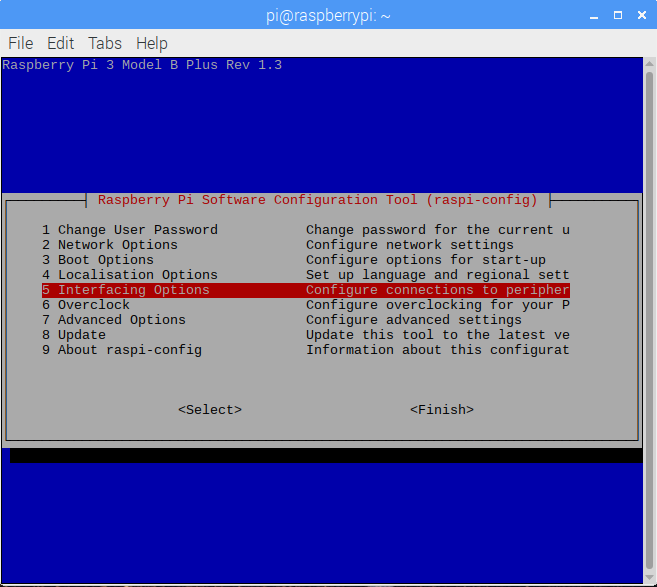
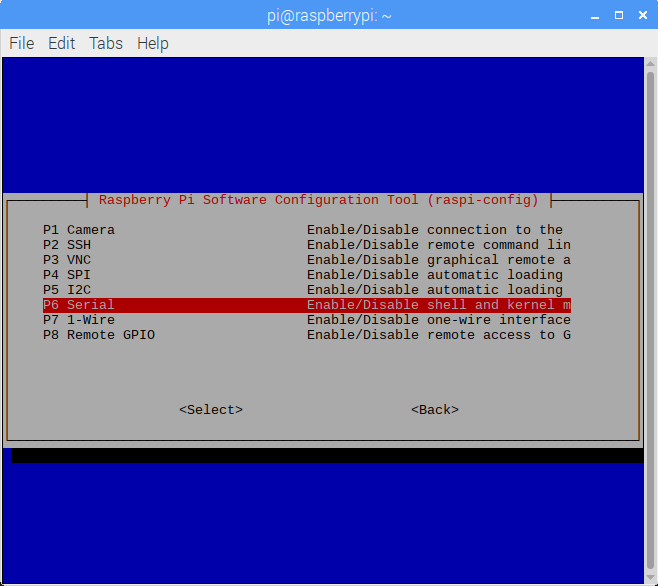
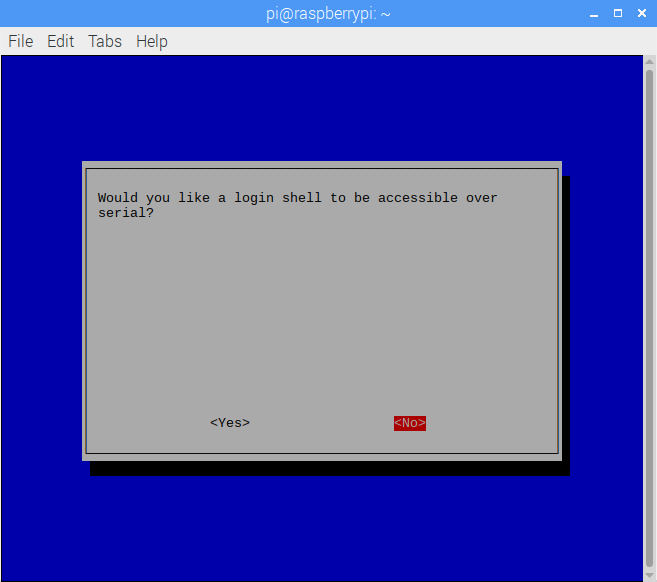
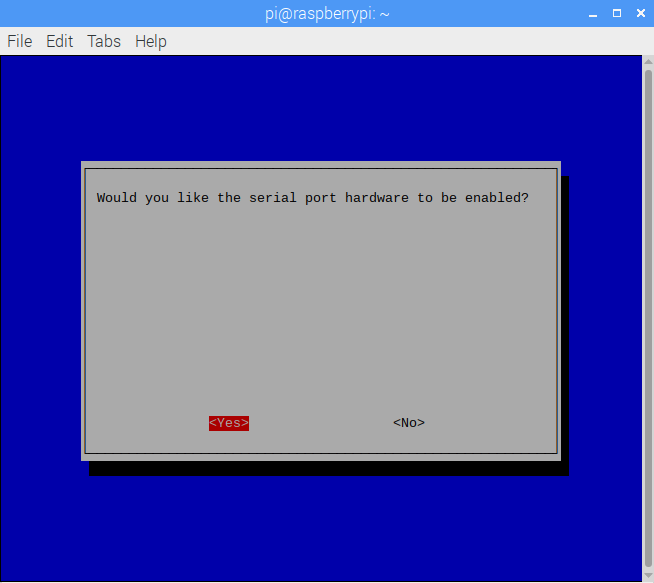
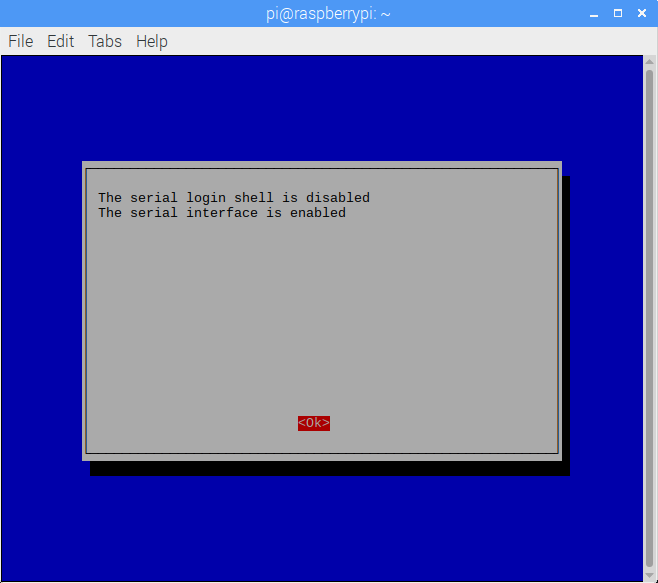
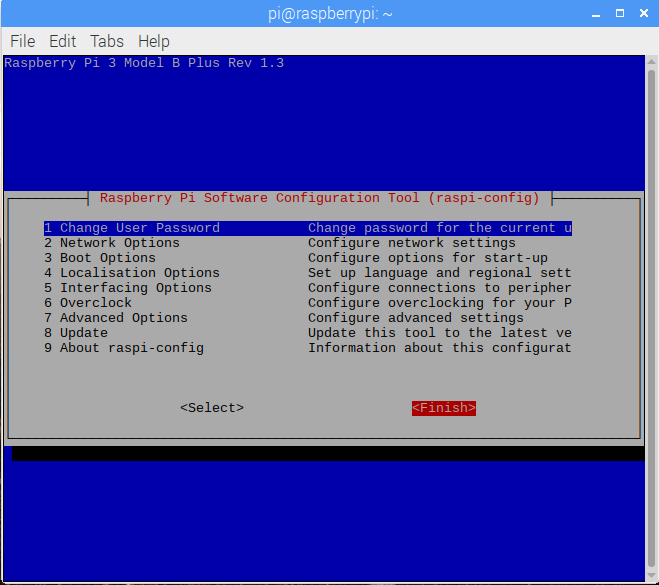
简单的描述一下过程:选Interfacing Options -> Serial -> No -> Yes -> 显示小节 然后回到主界面 -> 利用TAB键 -> 选到 Finish -> 重启选Yes

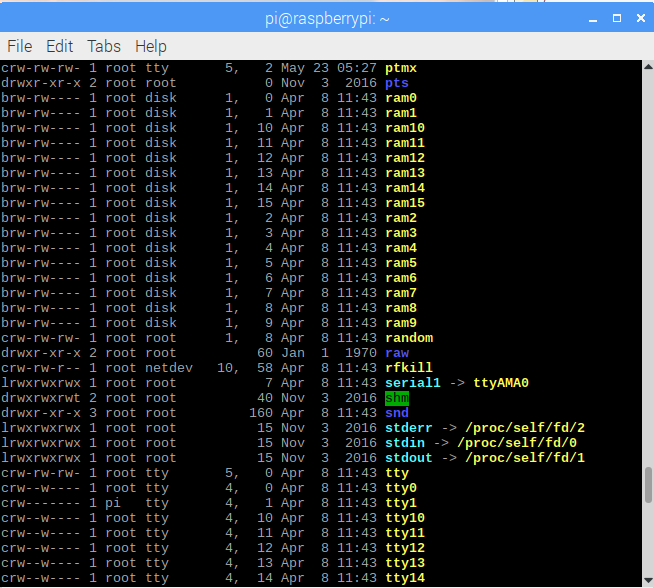
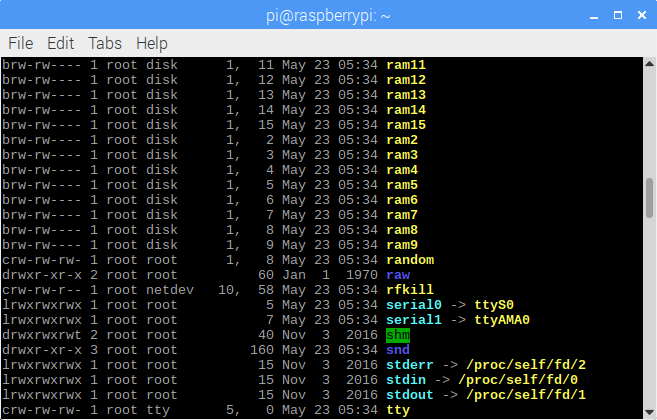
重启之后,利用ls -l /dev 再次查看串口设备的指向关系
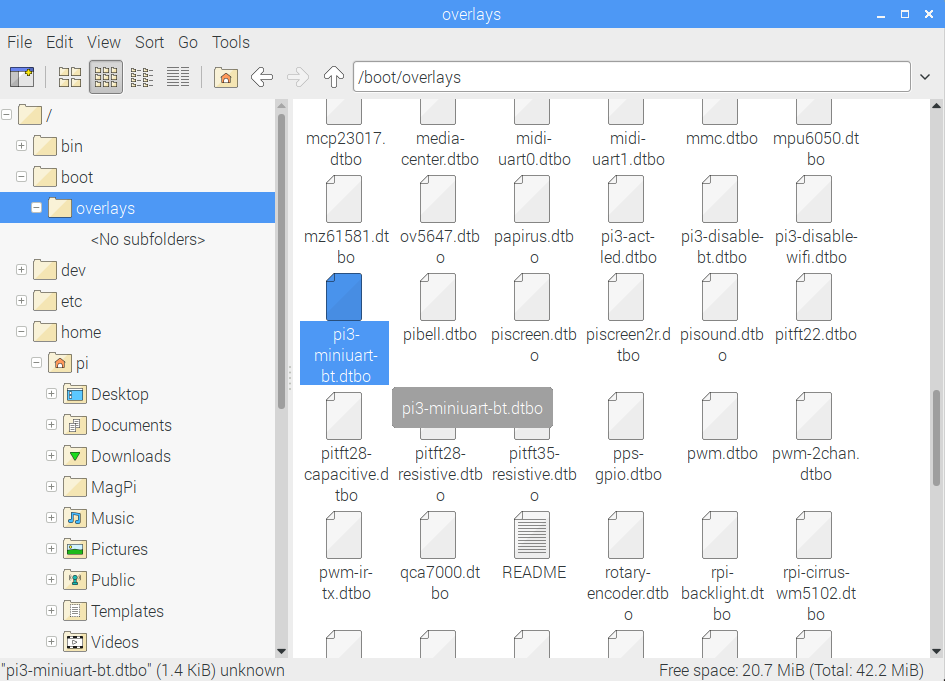
首先查看下/boot/overlays,确认有一个叫pi3-miniuart-bt.dtbo的文件。
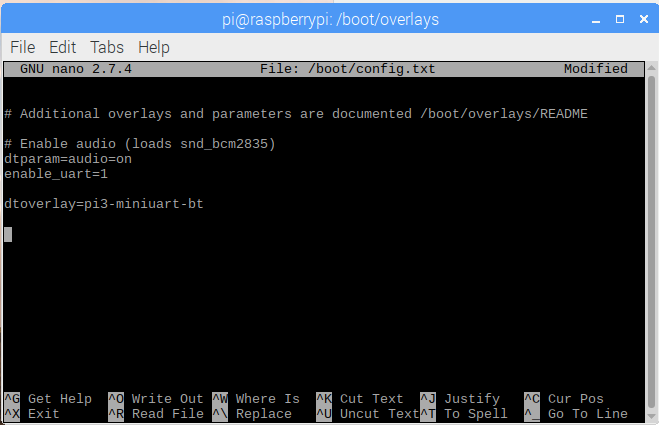
命令行打入 sudo nano /boot/config.txt ,在文件的最后加入:pi3-miniuart-bt
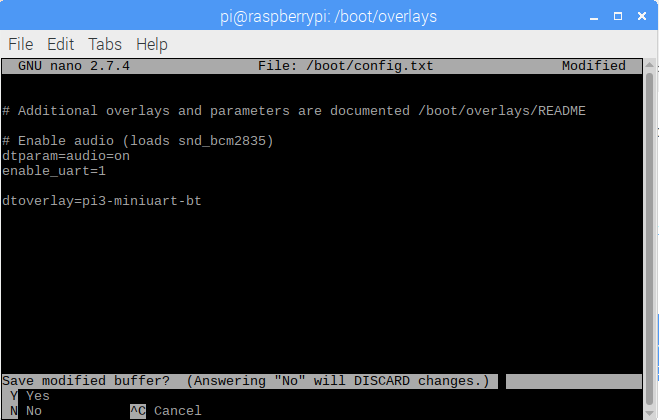
ctrl+x -> Yes -> 回车退出:
再次用ls -l /dev,查看串口0和串口1的指向关系。主要是查看 serial0 -> ttyAMA0 这个指向要确保和下图一致。 UPS python程序就是和树莓派 /dev/ttyAMA0进行通讯的。

首先把UPS和树莓派IO口进行连接:

相连的5个管脚的定义图:分别是5V(红色)、GND(黑色)、TXD(绿色)、RXD(黄色)、STA(蓝色),蓝色这条信号线,用于single IO warning功能,可接在任意空闲IO上。我们提供的UPS类库中默认定义在BCM.18脚,所以蓝色杜邦线接在下图的位置。

Raspbian默认无内置minicom软件,通过 sudo apt-get install minicom 进行下载安装。
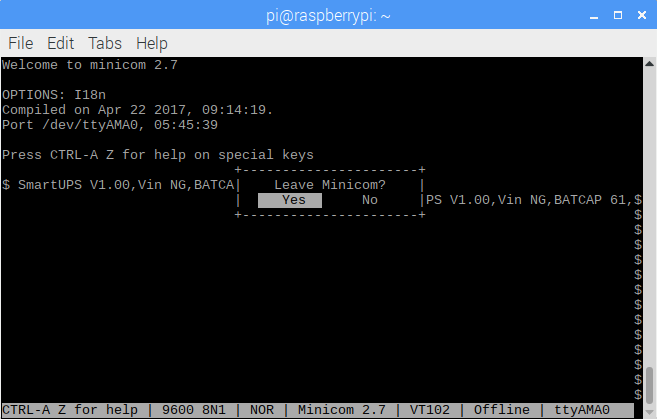
运行:sudo minicom -D /dev/ttyAMA0 -b 9600
可以看到UPS发到树莓派上的协议数据包。由于Linux上'\n'只换行,不回到行首。所以minicom上看到的协议,会超出屏幕。这没有关系,我们后面可以利用python来过滤这些信息。
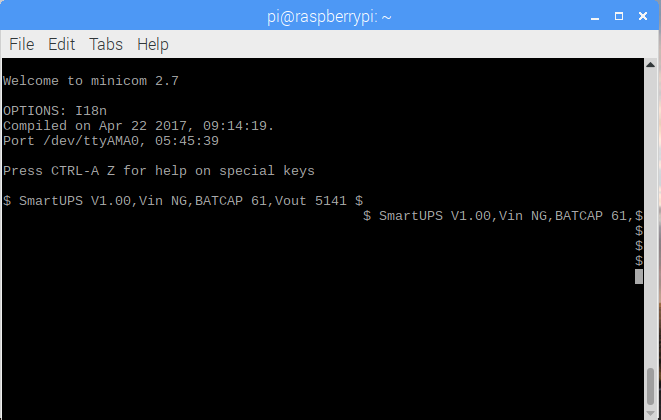
如果还没看到UPS的数据包,请从本文开头进行步骤对比,一般是中间有步骤漏做导致。如果想退出minicom: ctrl+A -> z -> x
install chinese 输入法: sudo apt-get install fcitx fcitx-googlepinyin fcitx-module-cloudpinyin fcitx-sunpinyin