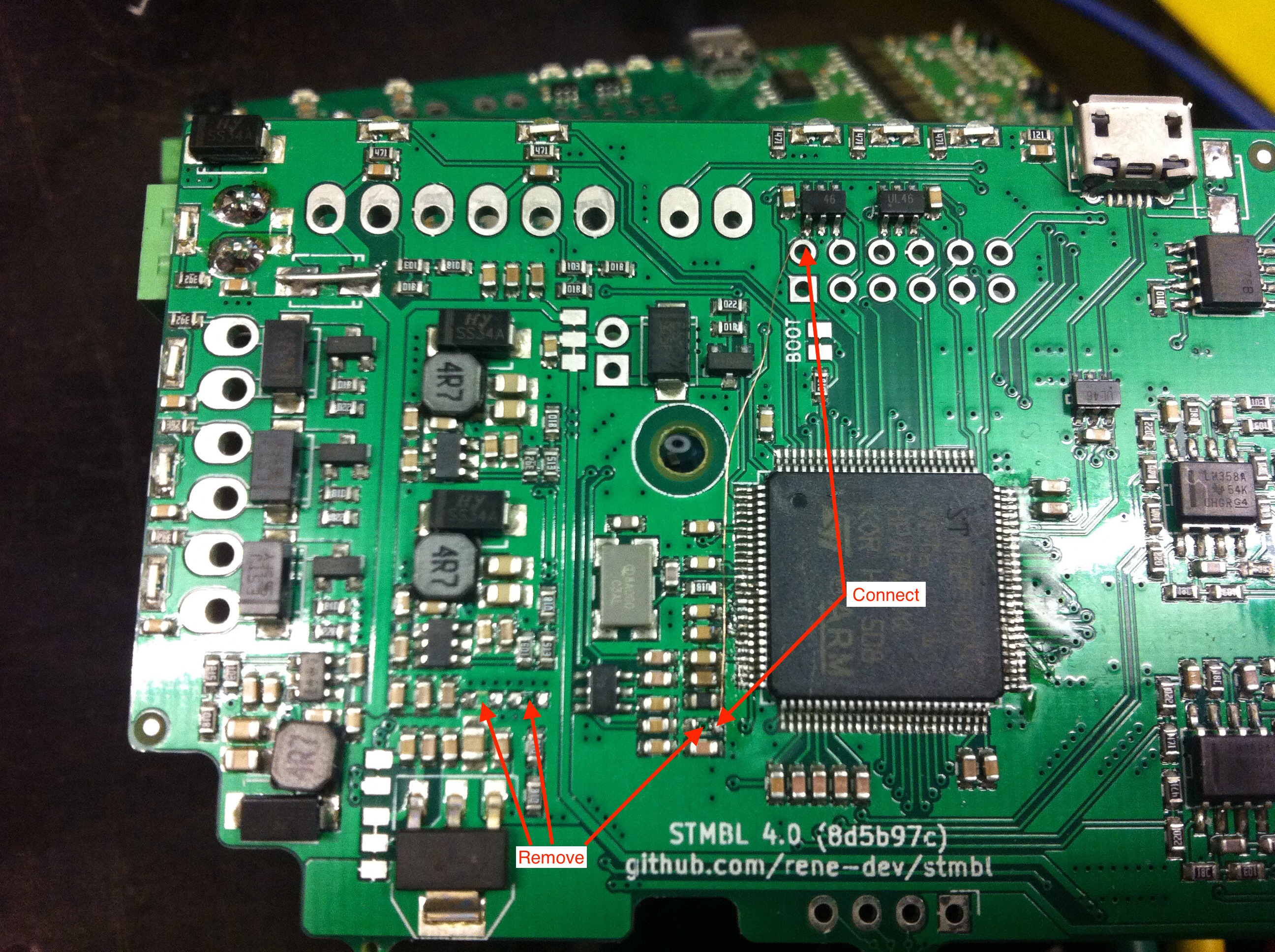
(Version 4.0 below)
- 12V regulator gets warm
(Version 3 below)
BOM on google docs (Note: this above BOM is for version 4.1)
- LNK pinout incorrect, requires bodging
- GND plane problem, requires bridge
- f3 uart silkscreen incorrect. read from the other direction.
- act4088 inductor package too small
- insufficient input protection on 24v input
- f3 pwm signals switched to silk screen (inverted / not inverted)
- 12V regulator gets hot
- to use smartserial and the mesa pinout with v4.0 apply this fix.
if you want to build version 3, use version 3.4
Parts are about 70€
warning: these are a bit outdated, only the ones in the git are up to date
- Do not populate R7
- Fan Tacho support broken, do not populate R38 and R51
- 5v encoders will fry the f4, use new values from updated BOM(R19,R26 = 470)!
- hw version 3.2: drain and source swapped on Q1 and Q3
- hw version 3.3: jp6 24v jumper setting is 5v
- uart on command rj45 pin 1 and 2 is inverted. for rs422 commands like smartserial this requires switching pin 1 and 2 in the cable, or using a fpga firmware which inverts the pin.
Close for resolvers with a 1:1 transmission ratio
Note: not needed anymore.
Fan supply voltage, 12V or 24V
Feedback supply voltage, 5V or 12V
Command supply voltage, 5V or 12V
enable feed for resolver excitation coil, connect 1-2, 3-4
Note: not needed anymore.
- verify erratas are met
- visually inspect board for solder bridges
- connect 24v to X8, limit to 0.15A. current should be about 0.1A
- check 12V, 5V and 3.3V supply on test points on f4 side of board
- check 15V and 3.3V on f1 side, using ground reference on f1 side
- flash f1 firmware
- flash f4 firmware
- connect via servoterm
- check hv0.dc_cur, should be around 0, but not exactly 0, if not check R10 and R11
- check hv0.dc_volt, should be the voltage on X9, test with 24v, if not check R1, R12, R2, R9
- check hv0.hv_temp, should be room temperature in °C, if not check R4
- if they all read 0, there is no communication to f1. check power and firmware.
- set jumpers and firmware for used feedback system
- check feedback system with servoterm

{kind=link}