The ros2_control implementation for any kind of ROBOTIS Dynamixel robots.
The dynamixel_hardware package is the SystemInterface implementation for the multiple ROBOTIS Dynamixel servos.
It is hopefully compatible any configuration of ROBOTIS Dynamixel servos thanks to the ros2_control's flexible architecture.
First install ROS 2 Rolling on Ubuntu 22.04. Then follow the instruction below.
$ source /opt/ros/rolling/setup.bash
$ mkdir -p ~/ros/rolling && cd ~/ros/rolling/src
$ git clone https://github.com/youtalk/dynamixel_hardware.git
$ git clone https://github.com/youtalk/dynamixel_hardware_examples.git
$ cd -
$ rosdep install --from-paths src --ignore-src -r -y
$ colcon build --symlink-install --cmake-args -DCMAKE_EXPORT_COMPILE_COMMANDS=ON
$ . install/setup.bashUpdate the usb_port, baud_rate, and joint_ids parameters on open_manipulator_x_description/urdf/open_manipulator_x.ros2_control.xacro to correctly communicate with Dynamixel motors.
The use_dummy parameter is required if you don't have a real OpenManipulator-X.
Note that joint_ids parameters must be splited by ,.
<hardware>
<plugin>dynamixel_hardware/DynamixelHardware</plugin>
<param name="usb_port">/dev/ttyUSB0</param>
<param name="baud_rate">1000000</param>
<!-- <param name="use_dummy">true</param> -->
</hardware>- Terminal 1
Launch the ros2_control manager for the OpenManipulator-X.
$ ros2 launch open_manipulator_x_description open_manipulator_x.launch.py- Terminal 2
Start the joint_trajectory_controller and send a /joint_trajectory_controller/follow_joint_trajectory goal to move the OpenManipulator-X.
$ ros2 control switch_controllers --activate joint_state_broadcaster --activate joint_trajectory_controller --deactivate velocity_controller
$ ros2 action send_goal /joint_trajectory_controller/follow_joint_trajectory control_msgs/action/FollowJointTrajectory -f "{
trajectory: {
joint_names: [joint1, joint2, joint3, joint4, gripper],
points: [
{ positions: [0.1, 0.1, 0.1, 0.1, 0], time_from_start: { sec: 2 } },
{ positions: [-0.1, -0.1, -0.1, -0.1, 0], time_from_start: { sec: 4 } },
{ positions: [0, 0, 0, 0, 0], time_from_start: { sec: 6 } }
]
}
}"If you would like to use the velocity control instead, switch to the velocity_controller and publish a /velocity_controller/commands message to move the OpenManipulator-X.
$ ros2 control switch_controllers --activate joint_state_broadcaster --deactivate joint_trajectory_controller --activate velocity_controller
$ ros2 topic pub /velocity_controller/commands std_msgs/msg/Float64MultiArray "data: [0.1, 0.1, 0.1, 0.1, 0]"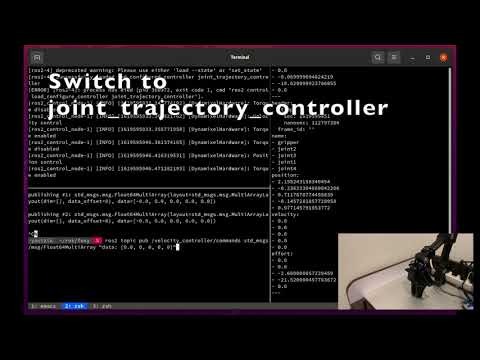
The use_dummy parameter is required if you use the dummy OpenManipulator-X.
diff --git a/open_manipulator_x_description/urdf/open_manipulator_x.ros2_control.xacro b/open_manipulator_x_description/urdf/open_manipulator_x.ros2_control.xacro
index c6cdb74..111846d 100644
--- a/open_manipulator_x_description/urdf/open_manipulator_x.ros2_control.xacro
+++ b/open_manipulator_x_description/urdf/open_manipulator_x.ros2_control.xacro
@@ -9,7 +9,7 @@
<param name="usb_port">/dev/ttyUSB0</param>
<param name="baud_rate">1000000</param>
- <!-- <param name="use_dummy">true</param> -->
+ <param name="use_dummy">true</param>
</hardware>
<joint name="joint1">
<param name="id">11</param>Then follow the same instruction of the real robot one.
Note that the dummy implementation has no interpolation so far. If you sent a joint message, the robot would move directly to the joints without interpolation.