A homework solution for the Autonomous Mobile Systems class at Beuth Hochschule für Technik, Berlin with Prof. Dr. Volker Sommer. Runs a simulation of a VolksBot with (error-free) laser rangers.
To compile and run the code, the following requirements must be fulfilled:
- OpenCV (
libopencv-dev) - OpenCV highgui (
libopencv-highgui-dev) - Player ~ 3.0.2
- Stage ~ 4.0.0
The easiest way to compile and start the code is to use Vagrant. After installing, simply run
$ vagrant upin the project directory to bootstrap a virtual machine that is preconfigured with Player/Stage. The VM will be downloaded if it doesn't already exist your local machine (which is likely if you run the command the first time).
Next, connect to the VM using:
$ vagrant sshTo build the project, do the following:
$ cd /vagrant
$ makeTo power down the VM, issue:
$ vagrant haltYou can then vagrant up it again later. To permanently remove it, type:
$ vagrant destroy
$ vagrant box remove sunside/playerstagewhich will delete the VM, as well as the base image.
To run the code, you basically
- start
player pstlab.cfg - then start
./simple localhost
Note that player and ./simple both require an X11 display. On Linux, you may try passing your $DISPLAY environment when connecting via ssh. The easiest way is to connect to a terminal with X forwarding enabled, using
vagrant ssh -- -X xtermand then, within the VM, type
cd /vagrant
make
player pstlab.cfg &
./simple localhostFor convenience, a dummy Xorg with fluxbox, as well as a noVNC server is started when the VM boots up. In your browser, you may go to http://localhost:6080/vnc.html to connect. Leave the password box empty.
Should you close the Xterm window, try right-clicking the desktop.
This implements a simple approach using meshed P controllers for forward and angular velocity in dependance of the distance to the next obstacle.
You can watch a demo video here.
The robot is modeled without slippage and measurement errors and sports a differential drive with v-omega control.

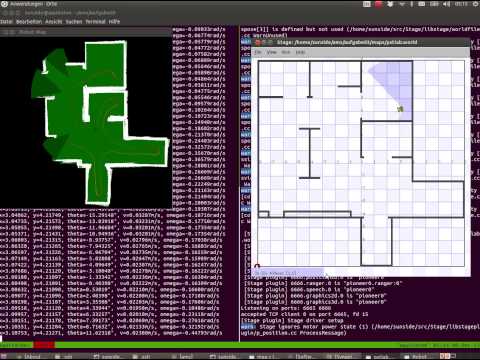
The Robot Map shows the map created by the robot, as well as the past trajectory. The yellow vectors points at the nearest unexplored boundary, using a Manhattan distance measure without paying attention to obstacles. As such, it is measured in air distance, which might be used as a heuristic for A* later on.

This program implements a frontier-based approach to exploration. A queue-linear flood fill algorithm is used to determine knowledge boundaries (white), i.e. areas that have not been scanned by the robot. The exploration algorithm terminates if no frontiers are left, meaning that the whole terrain has been explored.

More on frontier-based exploration can be found in e.g. A Frontier-Based Approach for Autonomous Exploration by Brian Yamauchi (http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.121.2826)
@INPROCEEDINGS{Yamauchi97afrontier-based,
author = {Brian Yamauchi},
title = {A frontier-based approach for autonomous exploration},
booktitle = {In Proceedings of the IEEE International Symposium on Computational Intelligence, Robotics and Automation},
year = {1997},
pages = {146--151}
}