—— 科学计算方向 51
原文:Gradient-enhanced physics-informed neural networks for forward and inverse PDE problems
参考:GPINN
-
近年来,大量文献研究表明PINN通过将PDE残差嵌入神经网络的损失函数中可以成功解决各类正向和反向问题。但是,即使采用在求解域充分的采样点,其准确度仍有限。因此,该文章提出了一种具有梯度增强的物理知识融合网络GPINNs,同时提高训练效率和网络准确性。
-
在GPINNs的实现过程中,作者将PDE残差的梯度信息作为一个加权损失函数补充训练。相对于传统的PINNs,作者处理的技巧主要包括了两点(GPINNs——Gradient-enhanced physics-informed neural networks):
- 在损失函数设计,GPINNs引入了PDE残差对各个自变量的梯度残差损失,并采用加权损失函数。
- 所有问题中均引入了hard constraints约束神经网络输出,使得边界条件和初始条件天然满足,降低了神经网络优化的难度。
- 在训练过程中,先以大量的残差样本点作为初始训练集,在训练过程中,通过不断寻找PDE残差较大的区域进行重采样进行补充训练集——即类似主动学习的策略对PINNs进行训练。
- gPINNs4paddle AI studio相关运行结果
-
脚本文件包括
- run_3.2.1.py、run_3.2.2.py——实际对应原文中3.2部分代码。
- run_3.3.1.py、run_3.3.2.py——实际对应原文中3.3.1部分代码。
- run_3.4.1.py、run_3.4.2.py——实际对应原文中3.4部分代码。
- 其中每个脚本都进行了如下的参数设置:
def get_args(): parser = argparse.ArgumentParser('PINNs for Poisson2D', add_help=False) parser.add_argument('-f', type=str, default="external") parser.add_argument('--net_type', default='gpinn', type=str) parser.add_argument('--epochs_adam', default=20000, type=int) parser.add_argument('--save_freq', default=5000, type=int, help="frequency to save model and image") parser.add_argument('--print_freq', default=1000, type=int, help="frequency to print loss") parser.add_argument('--device', default=True, type=bool, help="use gpu") parser.add_argument('--work_name', default='Poisson-2D', type=str, help="save_path") parser.add_argument('--Nx_EQs', default=100, type=int) parser.add_argument('--Nt_Val', default=100, type=int) parser.add_argument('--Nx_Val', default=100, type=int) parser.add_argument('--g_weight', default=0.01, type=float) return parser.parse_args()
其中,net_type可供选择采用gPINN模式或pinn模式;
epochs_adam为采用adam优化器进行训练的总步数;
save_freq、print_freq为打印残差以及输出中间可视化结果的频率;
device为是否使用gpu并行;
work_name为保存路径。
Nx_EQs为训练PDE残差的采样点个数;
Nt_Val、Nx_Val分别指代采用验证数据时在时间t(如果存在)以及x方向的采样点个数(均匀网格);
g_weight为gradient ehanced的残差权重,即下式的
$w_{g_i}$ 。$$ \mathcal{L}=w_f \mathcal{L}f+w_b \mathcal{L}b+w_i \mathcal{L}i+\sum{i=1}^d w{g_i} \mathcal{L}{g_i}\left(\boldsymbol{\theta} ; \mathcal{T}_{g_i}\right) $$
其中,
$L_f、L_b、L_i$ 为PDE残差、边界条件、初始条件损失,权重均默认为1,后两者由于采用了hard constraints因此均为0。 -
fig文件夹中为原始论文结果相关图片以及作者复现所整理的对应结果,work文件夹中为训练过程及中间结果
- Poisson-1D为3.2.1中算例对应结果文件存放位置,用于绘制Figure2。
- Poisson-2D为3.2.2中算例对应结果文件存放位置,用于绘制Figure3。
- Brinkman-Forchheimer-1为3.3.1中算例对应结果文件存放位置,用于绘制Figure 6,反问题中预测一个参数。
- Brinkman-Forchheimer-2为3.3.1中算例对应结果文件存放位置,用于绘制Figure 7,反问题中预测二个参数。
- Buergers-2D为3.4中算力对应结果文件存放位置,用于绘制Figure 10、11、12。
-
basic_model.py 中为实现的全连接神经网络结构
-
process_data.py 中为求解域离散点采样方法
-
visual_data.py 为训练过程的数据可视化
numpy == 1.22.3
paddlepaddle-gpu develop
matplotlib==3.5.1
seaborn==0.11.2
1).原始方程为1-D Poisson方程:
方程解析解为
损失函数为
1D Possion (对应文章 3.2.1 Figure 2)详细代码见run_3.2.1.py 以及train_3.2.1.sh 设置不同的traning points——Nx_EQs以及权重
| 复现 | 论文 | |
|---|---|---|
| Figure 2 A |  |
 |
| Figure 2 B |  |
 |
| Figure 2 C |  |
 |
| Figure 2 D |  |
 |
| Figure 2 E |  |
 |
| Figure 2 F |  |
 |
| Figure 2 G |  |
 |
2).原始方程为2-D Poisson方程:
其中源项:
方程解析解为
损失函数为
$$ \mathcal{L}=\mathcal{L}f+w \mathcal{L}{g_x}+w \mathcal{L}_{g_t} $$
2D Possion (对应文章 3.2.2),详细代码见run_3.2.2.py 以及train_3.2.2.sh 设置不同的Nx_EQs以及权重w。
| 复现 | 论文 | |
|---|---|---|
| Figure 3 A |  |
 |
| Figure 3 B |  |
 |
| Figure 3 C |  |
 |
| Figure 3 D |  |
 |
原始方程为1-DBrinkman-Forchheimer方程:、
解析解为:
此外,本问题中还需识别模型的粘度
1).仅预测Brinkman-Forchheimer 模型的粘度
需要指出复现结果中,gPINN相对于PINN在训练样本点较少时优势明显,但随着训练样本增多时,gPINN优势并不明显。
| 复现 | 论文 | |
|---|---|---|
| Figure 6 A |  |
 |
| Figure 6 B |  |
 |
| Figure 6 C |  |
 |
| Figure 6 D |  |
 |
| Figure 6 E |  |
 |
2).同时预测Brinkman-Forchheimer 模型的粘度
| 复现 | 论文 | |
|---|---|---|
| Figure 7 A |  |
 |
| Figure 7 B |  |
 |
| Figure 7 C |  |
 |
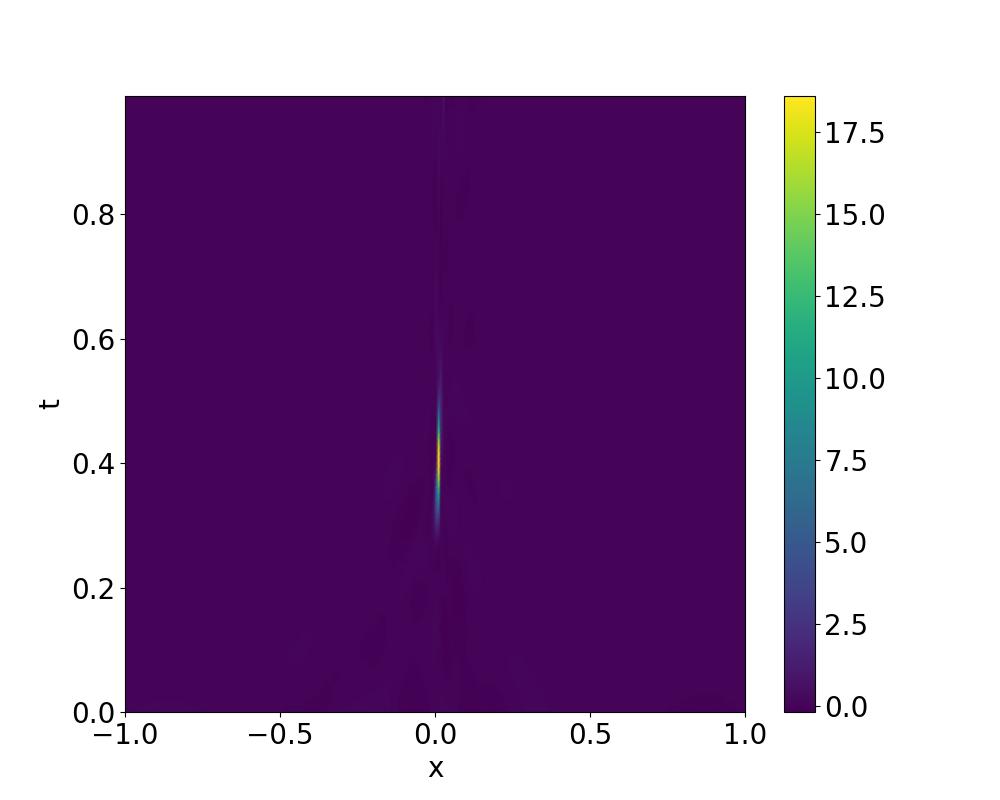
原始方程为2D-Burgers方程:
初始条件、边界条件为:
其数值解作者在论文github中已提供https://github.com/lu-group/gpinn。
1).综合对比,详细代码见run_3.4.1.py 以及train_3.4.1.sh 设置不同的training points——Nx_EQs以及net_type。
| 复现 | 论文 | |
|---|---|---|
| 对比 |  |
 |
2).PINN with RAR
| 残差点数 | 残差点图 | 物理场误差 | PDE残差 |
|---|---|---|---|
| 1500 |  |
 |
 |
| 1600 |  |
 |
 |
| 1700 |  |
 |
 |
| 1800 |  |
 |
 |
| 1900 |  |
 |
 |
论文结果为Fig 11

3).GPINN with RAR
| 残差点数 | 残差点图 | 物理场误差 | PDE残差 |
|---|---|---|---|
| 1500 |  |
 |
 |
| 1600 |  |
 |
 |
| 1700 |  |
 |
 |
| 1800 |  |
 |
 |
| 1900 |  |
 |
 |
论文结果为Fig 12

构建偏微分方程残差对自变量的自动微分时,目前Paddle的动态图不支持3阶以上微分,因此需要使用静态图模式,但对论文3.4.1以及3.4.2算例计算有误,代码如下时无法运行(该方式在其他算例中均可运行)。
def equation(self, inn_var):
out_var = self.forward(inn_var)
out_var = self.out_transform(inn_var, out_var)
duda = paddle.incubate.autograd.grad(out_var, inn_var)
dudx, dudt = duda[:, 0:1], duda[:, 1:2]
Ddudx = paddle.incubate.autograd.grad(dudx, inn_var)
d2udx2 = Ddudx[:, 0:1]
# eqs = 0.
eqs = dudt + out_var * dudx - 0.01 / pi * d2udx2
if 'gpinn' in opts.net_type:
g_eqs = paddle.incubate.autograd.grad(eqs, inn_var)
else:
g_eqs = paddle.zeros((2,), dtype=paddle.float32)
return out_var, eqs, g_eqs因此采用手动微分计算PDE残差对自变量的微分,修正为:
def equation(self, inn_var):
out_var = self.forward(inn_var)
out_var = self.out_transform(inn_var, out_var)
duda = paddle.incubate.autograd.grad(out_var, inn_var)
dudx, dudt = duda[:, 0:1], duda[:, 1:2]
Ddudx = paddle.incubate.autograd.grad(dudx, inn_var)
d2udx2 = Ddudx[:, 0:1]
# eqs = 0.
eqs = dudt + out_var * dudx - 0.01 / pi * d2udx2
if 'gpinn' in opts.net_type:
Dd2udx2 = paddle.incubate.autograd.grad(d2udx2, inn_var)
Ddudt = paddle.incubate.autograd.grad(dudt, inn_var)
d2udtx, d2udt2 = Ddudt[:, 0:1], Ddudt[:, 1:2]
d3udx3, d3udx2t = Dd2udx2[:, 0:1], Dd2udx2[:, 1:2]
g_eqs = [d2udtx + (dudx * dudx + out_var * d2udx2) - 0.01 / pi * d3udx3,
d2udt2 + (dudt * dudx + out_var * d2udtx) - 0.01 / pi * d3udx2t, ]
# temp = paddle.incubate.autograd.grad(eqs, inn_var)
# g_eqs = temp[:, 0:1]
else:
g_eqs = paddle.zeros((2,), dtype=paddle.float32)
return out_var, eqs, g_eqs| 信息 | 说明 |
|---|---|
| 发布者 | tianshao1992 |
| 时间 | 2022.9 |
| 框架版本 | Paddle Develope |
| 应用场景 | 科学计算 |
| 支持硬件 | CPU、GPU |
| AI studio地址 | https://aistudio.baidu.com/aistudio/projectdetail/4493662 |