


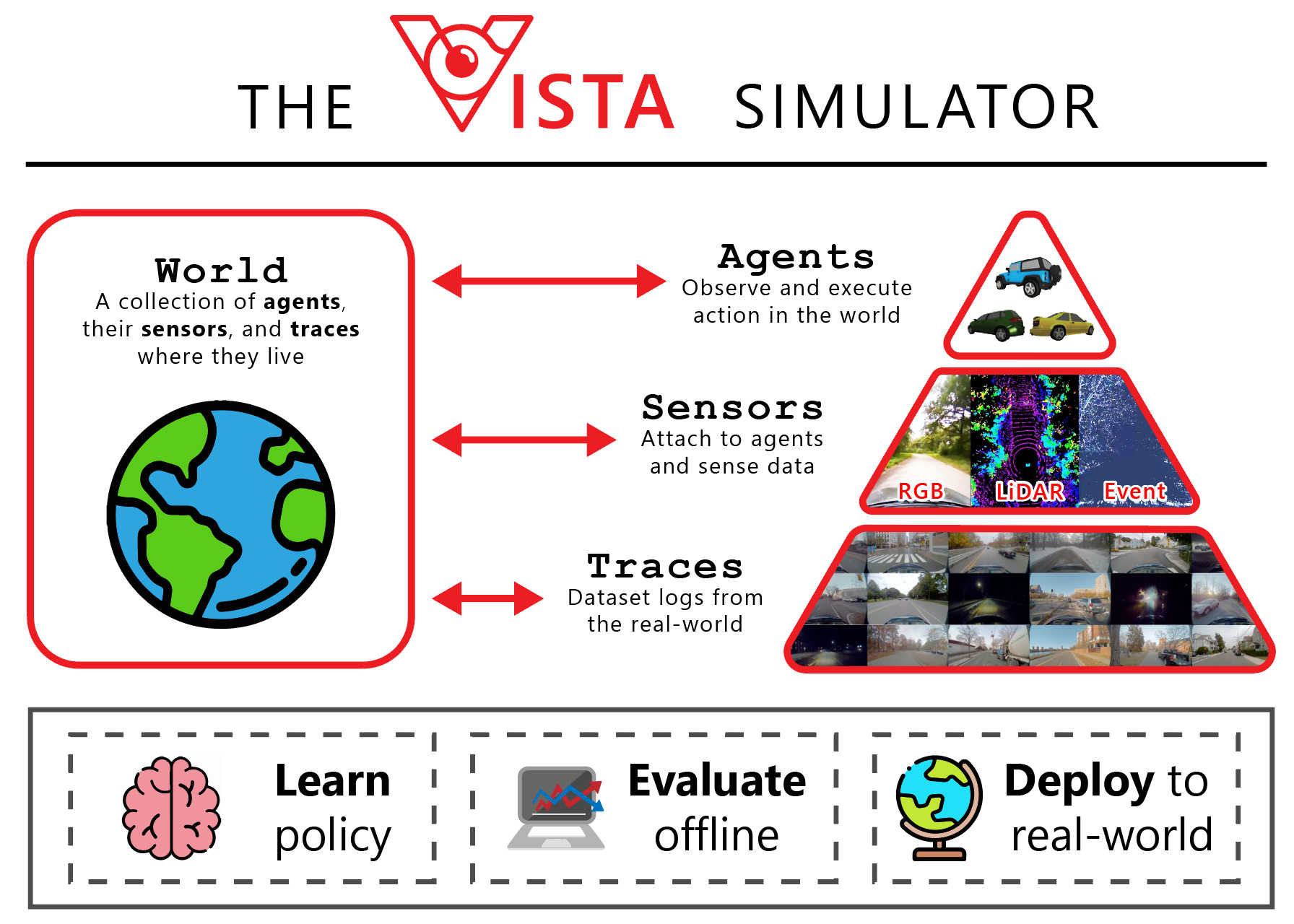
VISTA is a data-driven simulation engine for autonomous driving perception and control. The VISTA API provides an interface for transforming real-world datasets into virtual environments with dynamic agents, sensor suites, and task objectives. Because VISTA is data-driven, it is side-steps many of the traditional issues of simulators, such as their lack of photorealism and ability to accurately model reality.
VISTA can be installed into your Python 3 environment using the PyPi package interface.
>> pip install vista
Please also ensure that you have all required dependencies to successfully run VISTA. Details on dependencies are outlined in the documentation.

If VISTA is useful or relevant to your research, we ask that you recognize our contributions by citing the following three original VISTA papers in your research:
% VISTA 1.0: Sim-to-real RL
@article{amini2020learning,
title={Learning Robust Control Policies for End-to-End Autonomous Driving from Data-Driven Simulation},
author={Amini, Alexander and Gilitschenski, Igor and Phillips, Jacob and Moseyko, Julia and Banerjee, Rohan and Karaman, Sertac and Rus, Daniela},
journal={IEEE Robotics and Automation Letters},
year={2020},
publisher={IEEE}
}
% VISTA 2.0: Multi-sensor simulation
@inproceedings{amini2022vista,
title={VISTA 2.0: An Open, Data-driven Simulator for Multimodal Sensing and Policy Learning for Autonomous Vehicles},
author={Amini, Alexander and Wang, Tsun-Hsuan and Gilitschenski, Igor and Schwarting, Wilko and Liu, Zhijian and Han, Song and Karaman, Sertac and Rus, Daniela},
booktitle={2022 International Conference on Robotics and Automation (ICRA)},
year={2022},
organization={IEEE}
}
% VISTA 2.0: Multi-agent simulation
@inproceedings{wang2022learning,
title={Learning Interactive Driving Policies via Data-driven Simulation},
author={Wang, Tsun-Hsuan and Amini, Alexander and Schwarting, Wilko and Gilitschenski, Igor and Karaman, Sertac and Rus, Daniela},
booktitle={2022 International Conference on Robotics and Automation (ICRA)},
year={2022},
organization={IEEE}
}
VISTA is constantly being advanced and has been built with research, extensibility, and community development as a priority. We actively encourage contributions to the VISTA repository and codebase, including issues, enhancements, and pull requests.