Unitree robot ROS2 support
[TOC]
Unitree SDK2 implements an easy-to-use robot communication mechanism based on Cyclonedds, which enable developers to achieve robot communication and control (Supports Unitree Go2, B2, and H1). See: https://github.com/unitreerobotics/unitree_sdk2
DDS is alos used in ROS2 as a communication mechanism. Therefore, the underlying layers of Unitree Go2, B2, and H1 robots can be compatible with ROS2. ROS2 msg can be direct used for communication and control of Unitree robot without wrapping the SDK interface.
Tested systems and ROS2 distro
| systems | ROS2 distro |
|---|---|
| Ubuntu 20.04 | foxy |
| Ubuntu 22.04 | humble |
Taking ROS2 foxy as an example, if you need another version of ROS2, replace "foxy" with the current ROS2 version name in the corresponding place:
The installation of ROS2 foxy can refer to: https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html
ctrl+alt+T open the terminal, clone the repository: https://github.com/unitreerobotics/unitree_ros2
git clone https://github.com/unitreerobotics/unitree_ros2where:
- cyclonedds_ws: The workspace of Unitree ros2 package. The msg for Unitree robot are supplied in the subfolder cyclonedds_ws/unitree/unitree_go and cyclonedds_ ws/unitree/unitree_api.
- example: The workspace of some examples.
sudo apt install ros-foxy-rmw-cyclonedds-cpp
sudo apt install ros-foxy-rosidl-generator-dds-idlThe cyclonedds version of Unitree robot is 0.10.2. To communicate with Unitree robots using ROS2, it is necessary to change the dds implementation. See:https://docs.ros.org/en/foxy/Concepts/About-Different-Middleware-Vendors.html
Before compiling cyclonedds, please ensure that ros2 environment has NOT been sourced when starting the terminal. Otherwise, it may cause errors in compilation.
If "source/opt/ros/foxy/setup. bash" has been added to the ~/.bashrc file when installing ROS2, it needs to be commented out:
sudo apt install gedit
sudo gedit ~/.bashrc# source /opt/ros/foxy/setup.bash Compile cyclone-dds
cd ~/unitree_ros2/cyclonedds_ws/src
git clone https://github.com/ros2/rmw_cyclonedds -b foxy
git clone https://github.com/eclipse-cyclonedds/cyclonedds -b releases/0.10.x
cd ..
colcon build --packages-select cyclonedds #Compile cyclone-dds packageAfter compiling cyclone-dds, ROS2 dependencies is required for compilation of the unitree_go and unitree_api packages. Therefore, before compiling, it is necessary to source the environment of ROS2.
source /opt/ros/foxy/setup.bash # source ROS2 environment
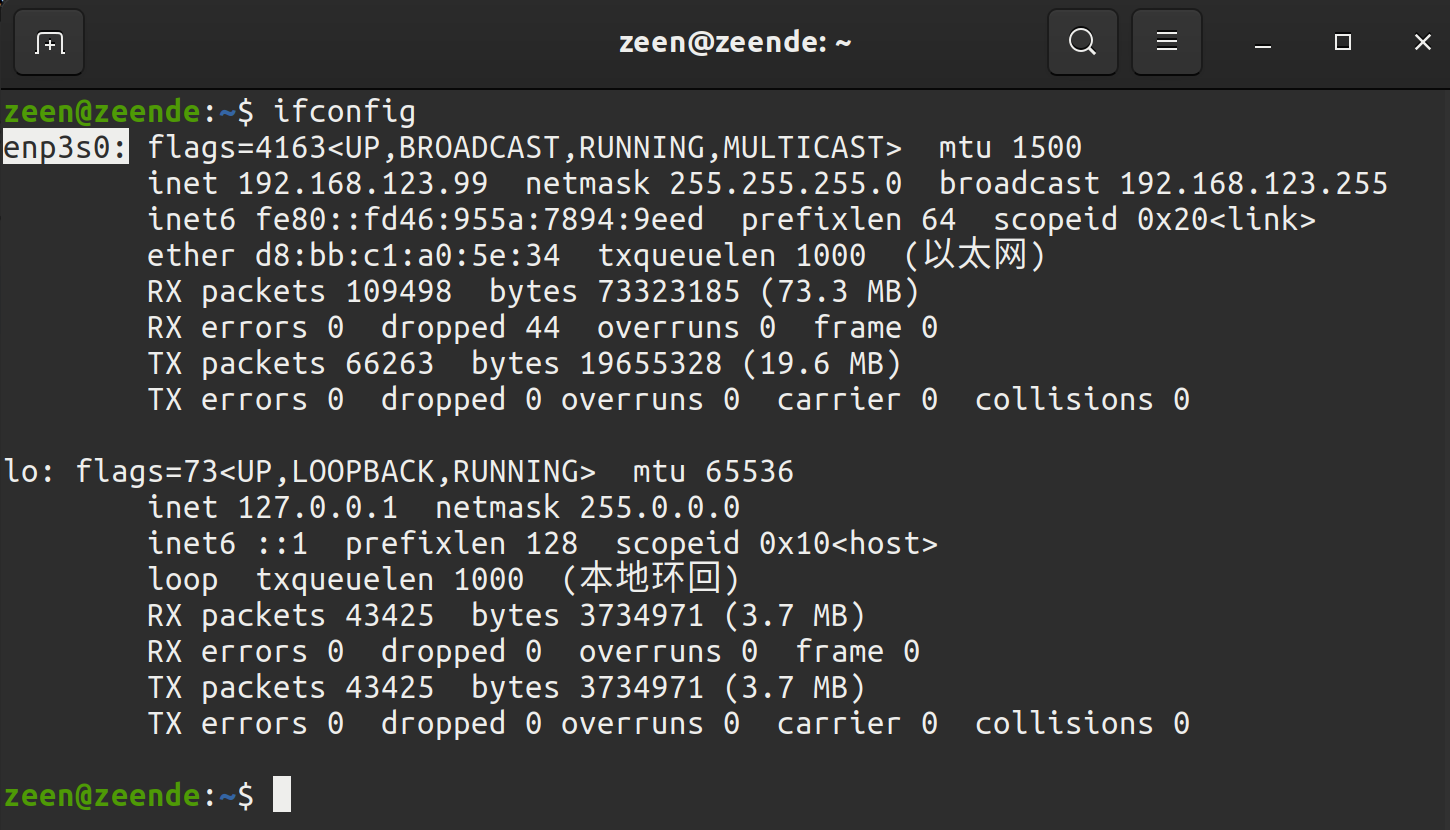
colcon build # Compile all packages in the workspaceConnect Unitree robot and the computer using Ethernet cable. Then, use ifconfig to view the network interface that the robot connected. For example, "enp3s0" in the following figure.
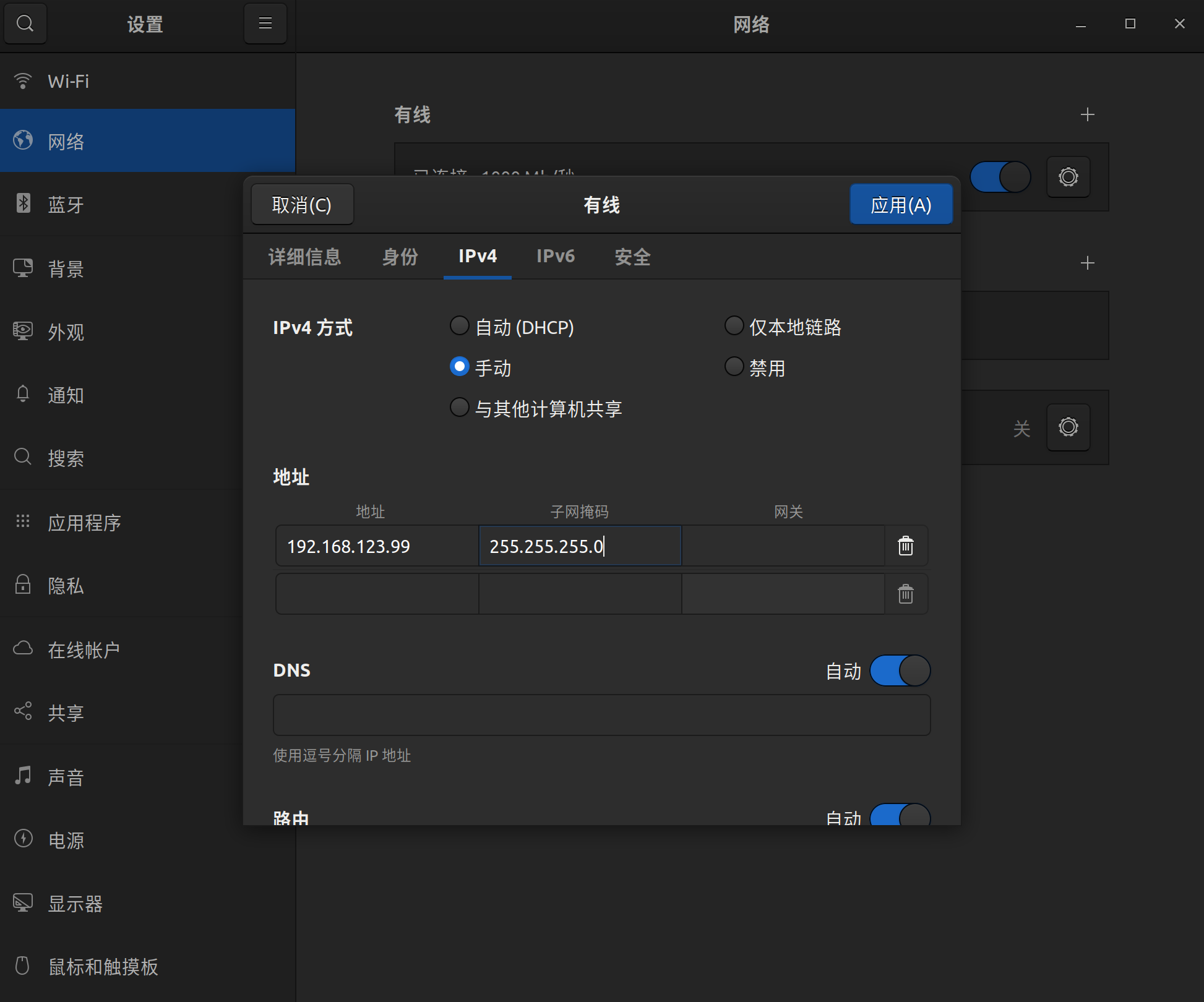
Next, open the network settings, find the network interface that the robot connected.In IPv4 setting, change the IPv4 mode to manual, set the address to 192.168.123.99, and set the mask to 255.255.255.0. After completion, click apply and wait for the network to reconnect.
Open setup.sh file.
sudo gedit ~/unitree_ros2/setup.sh#!/bin/bash
echo "Setup unitree ros2 environment"
source /opt/ros/foxy/setup.bash
source $HOME/unitree_ros2/cyclonedds_ws/install/setup.bash
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
export CYCLONEDDS_URI='<CycloneDDS><Domain><General><Interfaces>
<NetworkInterface name="enp3s0" priority="default" multicast="default" />
</Interfaces></General></Domain></CycloneDDS>'where "enp3s0" is the network interface name of unitree robot connected. Modify it to the corresponding network interface according to the actual situation.
Source the environment to setup the ROS2 support of Unitree robot:
source ~/unitree_ros2/setup.shIf you don't want to source the bash script every time when a new terminal opens, you can write the content of bash script into ~/.bashrc, but attention should be paid when there are multiple ROS environments coexisting in the system.
If your computer is not connected to the robot but you still want to use Unitree ROS2 for simulation and other functions, you can use the local loopback "lo" as the network interface.
source ~/unitree_ros2/setup_local.sh # use "lo" as the network interfaceor
source ~/unitree_ros2/setup_default.sh # No network network interface specified After completing the above configuration, it is recommended to restart the computer before conducting the test.
Ensure that the network of robot is connected correctly, open a terminal and input:
source ~/unitree_ros2/setup.sh
ros2 topic listYou can see the following topics:
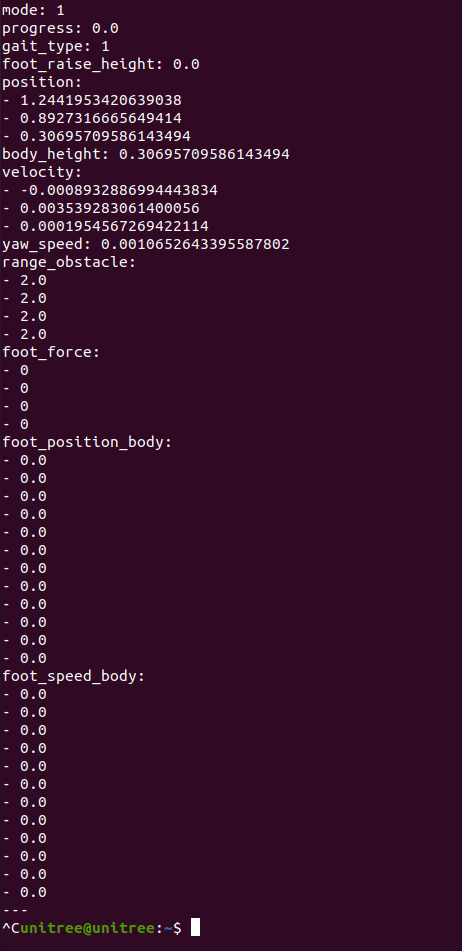
Input ros2 topic echo /sportmodestate,you can see the data of the topic as shown in the following figure:
Open a terminal and input:
source ~/unitree_ros2/setup.sh
cd ~/unitree_ros2/example
colcon buildAfter compilation, run in the terminal:
./install/unitree_ros2_example/bin/read_motion_state You can see the robot status information output from the terminal:
[INFO] [1697525196.266174885] [motion_state_suber]: Position -- x: 0.567083; y: 0.213920; z: 0.052338; body height: 0.320000
[INFO] [1697525196.266230044] [motion_state_suber]: Velocity -- vx: -0.008966; vy: -0.001431; vz: -0.019455; yaw: -0.002131
[INFO] [1697525196.266282725] [motion_state_suber]: Foot position and velcity relative to body -- num: 0; x: 0.204149; y: -0.145194; z: -0.067804, vx: 0.002683; vy: 0.003745; vz: -0.010052
[INFO] [1697525196.266339057] [motion_state_suber]: Foot position and velcity relative to body -- num: 1; x: 0.204200; y: 0.145049; z: -0.068205, vx: -0.001954; vy: -0.003442; vz: -0.004828
[INFO] [1697525196.266392028] [motion_state_suber]: Foot position and velcity relative to body -- num: 2; x: -0.183385; y: -0.159294; z: -0.039468, vx: -0.000739; vy: -0.002028; vz: -0.004532
[INFO] [1697525196.266442766] [motion_state_suber]: Foot position and velcity relative to body -- num: 3; x: -0.182412; y: 0.159754; z: -0.039045, vx: -0.002803; vy: -0.001381; vz: -0.004794
[INFO] [1697525196.316189064] [motion_state_suber]: Gait state -- gait type: 1; raise height: 0.090000Sportmode state includes position, velcity, foot position, and other motion states of the robot. The acquisition of sportmode state can be achieved by subscribing "lf/sportmodestate" or "sportmodestate" topic, where "lf" represents low frequency. The msg of sportmodestate is defined as:
TimeSpec stamp // Time stamp
uint32 error_code //Error code
IMUState imu_state //IMU state
uint8 mode //Sport mode
/*
Sport mode
0. idle, default stand
1. balanceStand
2. pose
3. locomotion
4. reserve
5. lieDown
6. jointLock
7. damping
8. recoveryStand
9. reserve
10. sit
11. frontFlip
12. frontJump
13. frontPounc
*/
float32 progress //Is the dance action being executed?:0. dance false; 1. dance true
uint8 gait_type //Gait type
/*
Gait type
0.idle
1.trot
2.run
3.climb stair
4.forwardDownStair
9.adjust
*/
float32 foot_raise_height
float32[3] position
float32 body_height
float32[3] velocity
float32 yaw_speed
float32[4] range_obstacle
int16[4] foot_force
float32[12] foot_position_body //foot positions in body frame
float32[12] foot_speed_body //foot velcities in body frameFor details, see:https://support.unitree.com/home/en/developer/sports_services.
Complete examples is in /example/src/read_motion_state.cpp. Run in the terminal:
./install/unitree_ros2_example/bin/read_motion_state The low-level state includes motors states, power information, and other low level states. Low-level states can be obtained by subscribing "lf/lowstate" or "lowstate" topic. The lowstate msg is defined as:
uint8[2] head
uint8 level_flag
uint8 frame_reserve
uint32[2] sn
uint32[2] version
uint16 bandwidth
IMUState imu_state //IMU
MotorState[20] motor_state //Motor state
BmsState bms_state
int16[4] foot_force
int16[4] foot_force_est
uint32 tick
uint8[40] wireless_remote
uint8 bit_flag
float32 adc_reel
int8 temperature_ntc1
int8 temperature_ntc2
float32 power_v
float32 power_a
uint16[4] fan_frequency
uint32 reserve
uint32 crcwhere MotorState are defined as:
uint8 mode // Mode, 0x01 for control
float32 q // Joint angle
float32 dq // Joint velocity
float32 ddq // Joint acceleration
float32 tau_est // Estimated torque
float32 q_raw //raw data of q
float32 dq_raw //raw data of dq
float32 ddq_raw //raw data of dq
int8 temperature
uint32 lost
uint32[2] reserveFor details, see: https://support.unitree.com/home/en/developer/Basic_services Complete examples is in example/src/read_low_state.cpp.
Wireless controller state can be obtained by subscribing "/wirelesscontroller" topic. The wirelesscontroller msg is defiened as:
float32 lx // left joystick x, range [-1.0~1.0]
float32 ly // left joystick y, range [-1.0~1.0]
float32 rx // right joystick x, range [-1.0~1.0]
float32 ry // right joystick y, range [-1.0~1.0]
uint16 keys // key valuesFor details, see: https://support.unitree.com/home/en/developer/Get_remote_control_status
Complete examples is in example/src/read_wireless_controller.cpp.
Sportmode control is implemented by request/response mechanism. Sportmode control can be achieved by sending unitree_api::msg::Request msg to the "/api/sport/request" topic.
The Request msg for different sportmode interfaces can be obtained by the SportClient (/example/src/common/ros2_sport_client.cpp) class. For example, control the robot to reach a desired attitude:
//Create a ros2 pubilsher
rclcpp::Publisher<unitree_api::msg::Request>::SharedPtr req_puber = this->create_publisher<unitree_api::msg::Request>("/api/sport/request", 10);
SportClient sport_req; //Sportclient
unitree_api::msg::Request req; //Sportmode request msg
sport_req.Euler(req,roll,pitch,yaw); //Get Sportmode request msg from Sportclient
req_puber->publish(req); // Publish request msgFor details about SportClient:https://support.unitree.com/home/en/developer/sports_services
Complete examples is in:example/src/sport_mode_ctrl.cpp. Run ./install/unitree_ros2_example/bin/sport_mode_ctrl in terminal. After 1 second of program startup, the robot will walk back and forth in the x direction.
The torque, position and velocity control of motor can be implemented by subscribing "/lowcmd" topic and sending unitree_go::msg::LowCmd msg. LowCmd msg is defined as:
uint8[2] head
uint8 level_flag
uint8 frame_reserve
uint32[2] sn
uint32[2] version
uint16 bandwidth
MotorCmd[20] motor_cmd //motor command
BmsCmd bms_cmd
uint8[40] wireless_remote
uint8[12] led
uint8[2] fan
uint8 gpio
uint32 reserve
uint32 crcwhere motor_cmd is defined as:
uint8 mode; //Mode(Foc mode -> 0x01 ,stop mode -> 0x00)
float q; //Target position (rad)
float dq; //Target velocity (rad/s)
float tau; //Target torque (N.M)
float kp;
float kd;
unsigned long reserve[3]; For details about low_cmd:https://support.unitree.com/home/en/developer/Basic_services
Complete examples is in:example/src/low_level_ctrl.cpo. Run ./install/unitree_ros2_example/bin/sport_mode_ctrl in terminal. The hip motor and calf motor of the RL leg will rotate to the corresponding joint angle.
We can also use rviz to visualize Unitree robot data.The following is an example of visualizing robot lidar data:
Firstly, list all topics:
ros2 topic list
We can find the topic of lida:
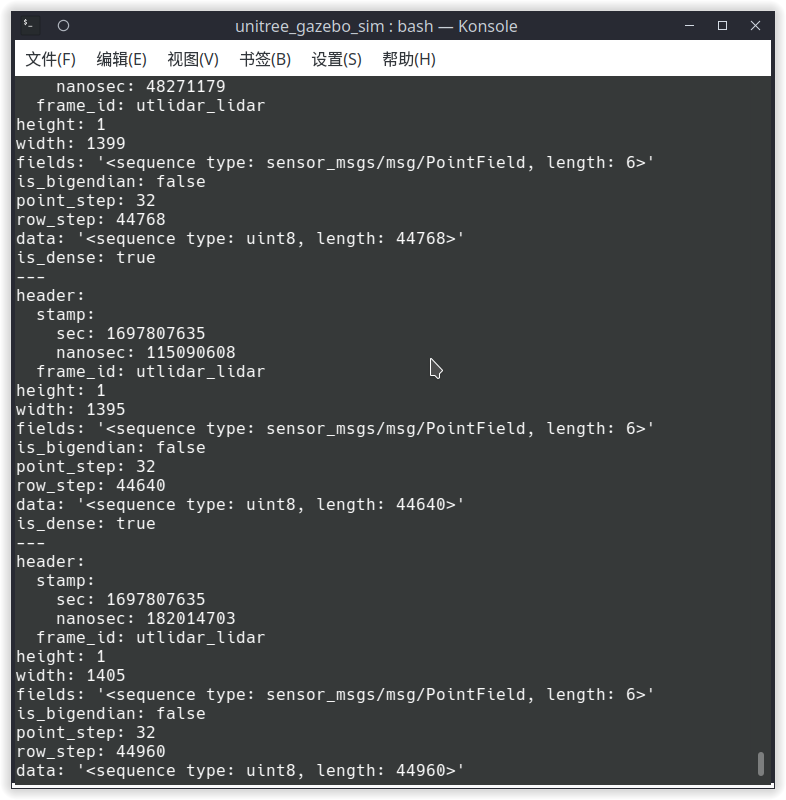
utlidar/cloudThen, echo frame_id of lidar:
ros2 topic echo --no-arr /utlidar/cloud
where frame_id: utlidar_lidar
Finally, run rviz:
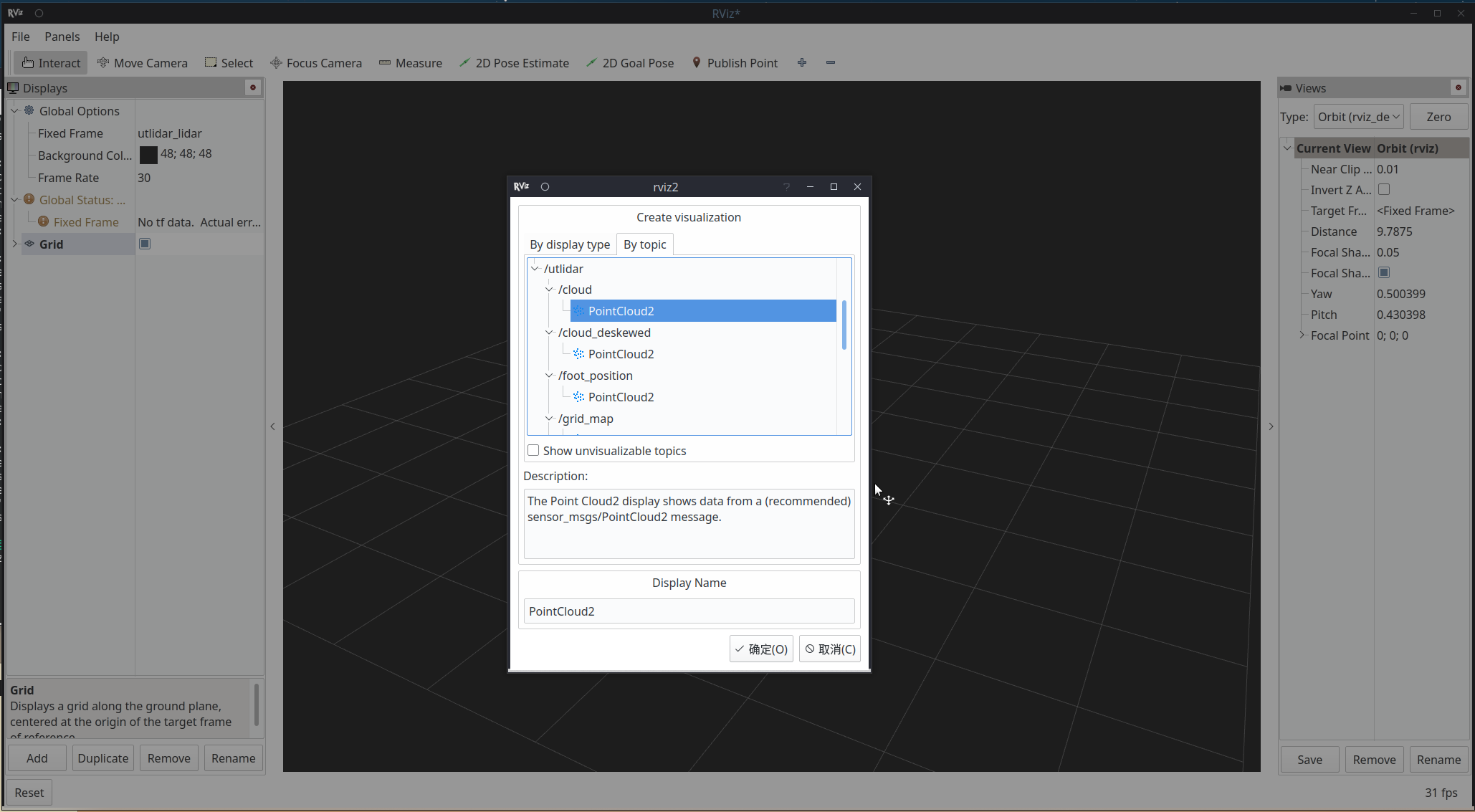
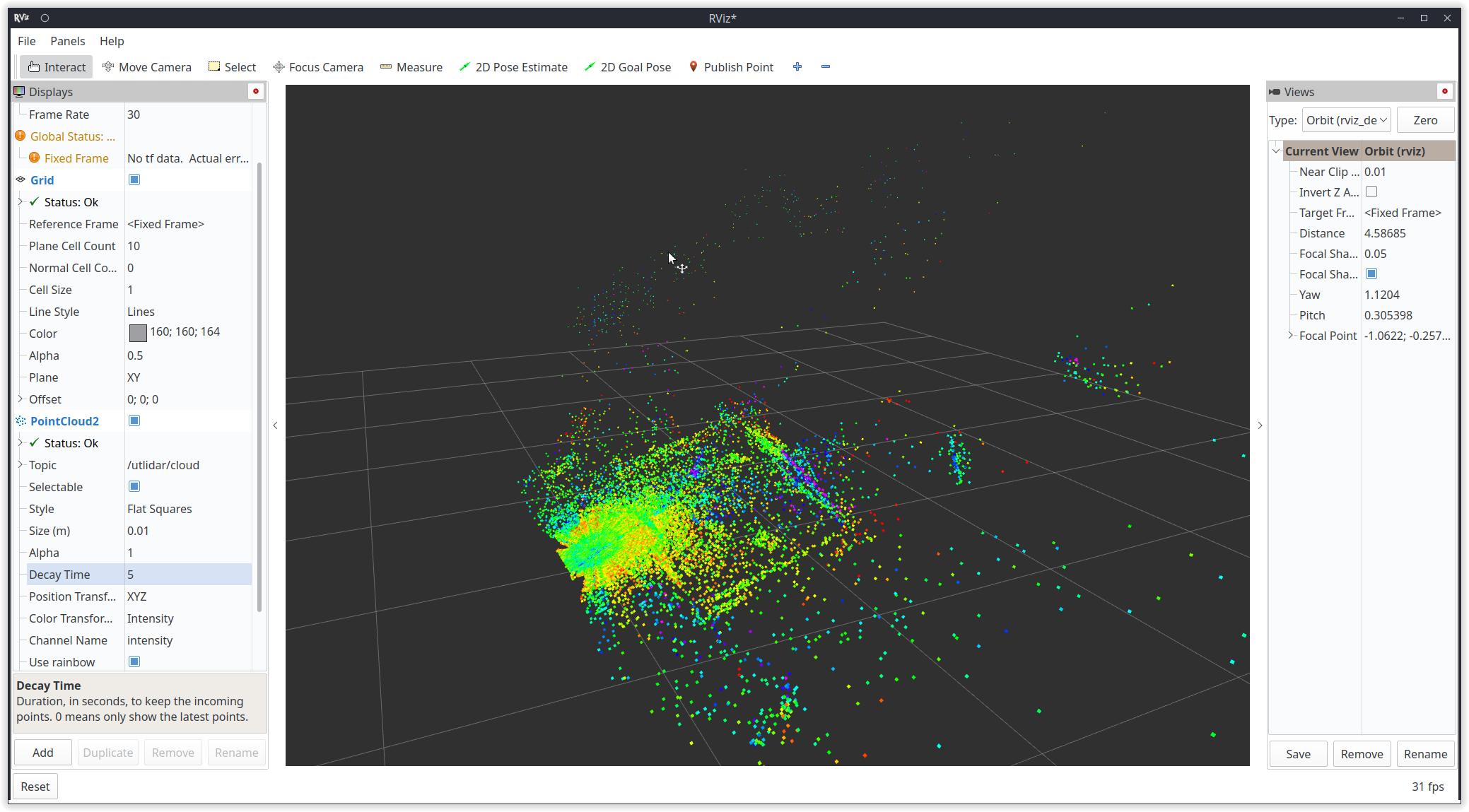
ros2 run rviz2 rviz2
Add Pointcloud topic: utlidar/cloud in rviz2 and modify Fixed frame to utlidar_lidar. Then, the lidar data is displayed in rviz2.