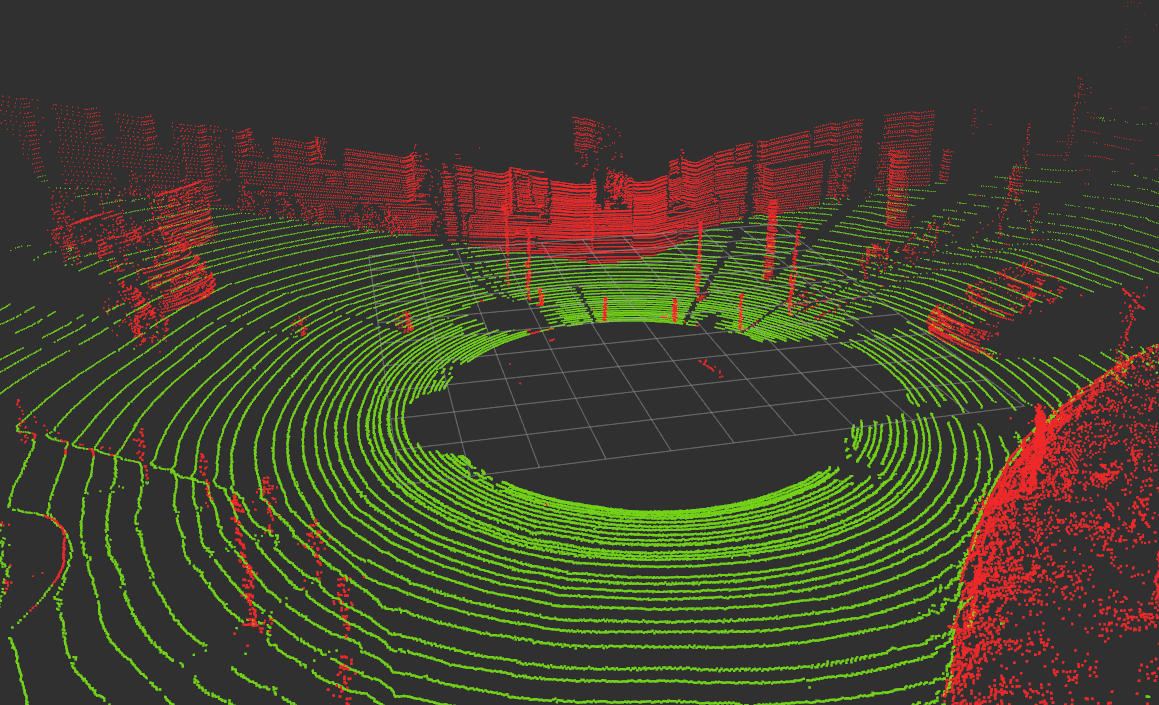
快速3D点云分割论文代码(带注解):Fast segmentation of 3d point clouds for ground vehicles
Implementation of the ground segmentation algorithm proposed in
@inproceedings{himmelsbach2010fast,
title={Fast segmentation of 3d point clouds for ground vehicles},
author={Himmelsbach, Michael and Hundelshausen, Felix V and Wuensche, H-J},
booktitle={Intelligent Vehicles Symposium (IV), 2010 IEEE},
pages={560--565},
year={2010},
organization={IEEE}
}
参考:https://github.com/lorenwel/linefit_ground_segmentation
相关算法(带中文详细注解):https://github.com/HuangCongQing/plane_fit_ground_filter
@双愚 , 若fork或star请注明来源
个人笔记已更新到知识星球:https://t.zsxq.com/0fsic6p29
Plus: 本人创建知识星球 【自动驾驶感知(PCL/ROS+DL)】 专注于自动驾驶感知领域,包括传统方法(PCL点云库,ROS)和深度学习(目标检测+语义分割)方法。同时涉及Apollo,Autoware(基于ros2),BEV感知,三维重建,SLAM(视觉+激光雷达) ,模型压缩(蒸馏+剪枝+量化等),自动驾驶模拟仿真,自动驾驶数据集标注&数据闭环等自动驾驶全栈技术,欢迎扫码二维码加入,一起登顶自动驾驶的高峰!
更多自动驾驶相关交流群,欢迎扫码加入:自动驾驶感知(PCL/ROS+DL):技术交流群汇总(新版)

Make sure you have the following is installed:
数据集已处理好,放在百度网盘上,需要自己下载
- kitti_2011_09_26_drive_0005_synced.bag
- 链接: https://pan.baidu.com/s/1sYWHzF11RpyEW25cQ_iNGA 密码: b6pd
将本仓库下的三个文件夹移动到catkin_wp/src下,然后执行下面操作
// 创建环境变量 src中运行
mkdir -p catkin_wp/src
cd catkin_wp/src
catkin_init_workspace
// 编译(需要回到工作空间catkin_wp)
cd ..
catkin_make // 产生build和devel文件夹
//设置环境变量,找到src里的功能包(每个新的shell窗口都要执行以下source devel/setup.bash)
source devel/setup.bash // 不同shell,不同哦.sh .zsh 通过设置gedit ~/.zshrc,不用每次都source详情可参考:https://www.yuque.com/docs/share/e59d5c91-b46d-426a-9957-cd262f5fc241?# 《09.创建工作空间与功能包※※※》
举例:修改输入topic
cd linefit_ground_segmentation/linefit_ground_segmentation_ros/launch/segmentation.launch
#第8行 <param name="input_topic" value="/kitti/velo/pointcloud" />修改你的雷达点云话题
<param name="input_topic" value="/kitti/velo/pointcloud" /> <!-- 输入topic -->
主要代码路径:
linefit_ground_segmentation/linefit_ground_segmentation/src
roscore
--loop循环
# kitti官方 注意修改路径path
rosbag play path/kitti_2011_09_26_drive_0005_synced.bag --loop
rviz
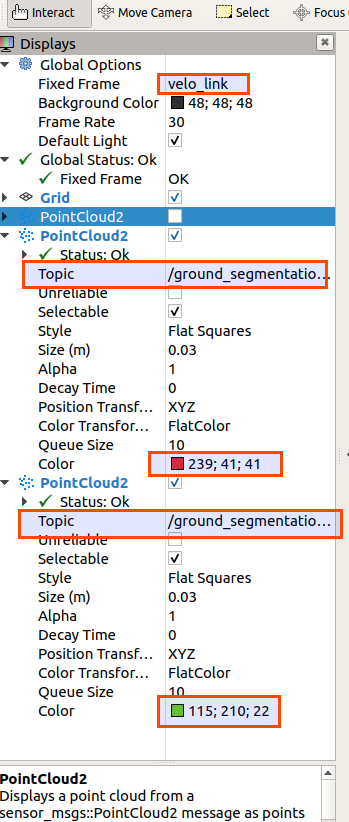
可使用此配置 config.rviz
注意:Fixed Frame: velo_link
# 运行launch
roslaunch linefit_ground_segmentation_ros segmentation.launch
- 项目代码:https://github.com/lorenwel/linefit_ground_segmentation
- 依赖1:git clone https://github.com/catkin/catkin_simple
- 依赖2:https://github.com/google/glog
- 注解:https://github.com/sysuzyc/road_detecting
- 论文:https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=5548059&tag=1
Copyright (c) 双愚. All rights reserved.
Licensed under the BSD 3-Clause License License.