NVIDIA-accelerated, deep-learned freespace segmentation
Isaac ROS Freespace Segmentation contains an ROS 2 package to produce occupancy grids for navigation. By processing a freespace segmentation mask with the pose of the robot relative to the ground, Bi3D Freespace produces an occupancy grid for Nav2, which is used to avoid obstacles during navigation. This package is GPU accelerated to provide real-time, low latency results in a robotics application. Bi3D Freespace provides an additional occupancy grid source for mobile robots (ground based).
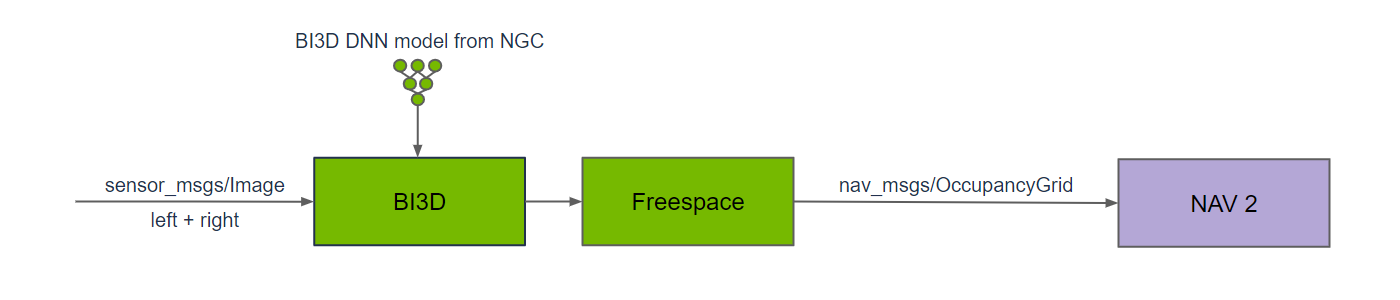
isaac_ros_bi3d is used in a graph of nodes to provide a freespace
segmentation mask as one output from a time-synchronized input left and
right stereo image pair. The freespace mask is used by
isaac_ros_bi3d_freespace with TF pose of the camera relative to the
ground to compute planar freespace into an occupancy grid as input to
Nav2.
There are multiple methods to predict the occupancy grid as an input to navigation. None of these methods are perfect; each has limitations on the accuracy of its estimate from the sensor providing measured observations. Each sensor has a unique field of view, range to provide its measured view of the world, and corresponding areas it does not measure. Bi3D Freespace provides a diverse approach to identifying obstacles from freespace. Stereo camera input used for this function is diverse relative to lidar, and has a better vertical field of view than most lidar units, allowing for perception of low lying obstacles that lidar can miss. Bi3D Freespace provides a robust, vision-based complement to lidar occupancy scanning.
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
| Sample Graph |
Input Size |
AGX Orin |
Orin NX |
Orin Nano 8GB |
x86_64 w/ RTX 4090 |
|---|---|---|---|---|---|
| Freespace Segmentation Node |
576p |
2120 fps 1.7 ms @ 30Hz |
2490 fps 1.6 ms @ 30Hz |
1560 fps 2.3 ms @ 30Hz |
3500 fps 0.52 ms @ 30Hz |
| Freespace Segmentation Graph |
576p |
36.5 fps 84 ms @ 30Hz |
27.8 fps 100 ms @ 30Hz |
22.0 fps 98 ms @ 30Hz |
100 fps 22 ms @ 30Hz |
Please visit the Isaac ROS Documentation to learn how to use this repository.
Update 2024-12-10: Update to be compatible with JetPack 6.1