NodeMCU
Datos relativos a NodeMCU 1.0
- Cómo usar NodeMCU con Arduino IDE
- Datos de NodeMCU
- NodeMCU pinout
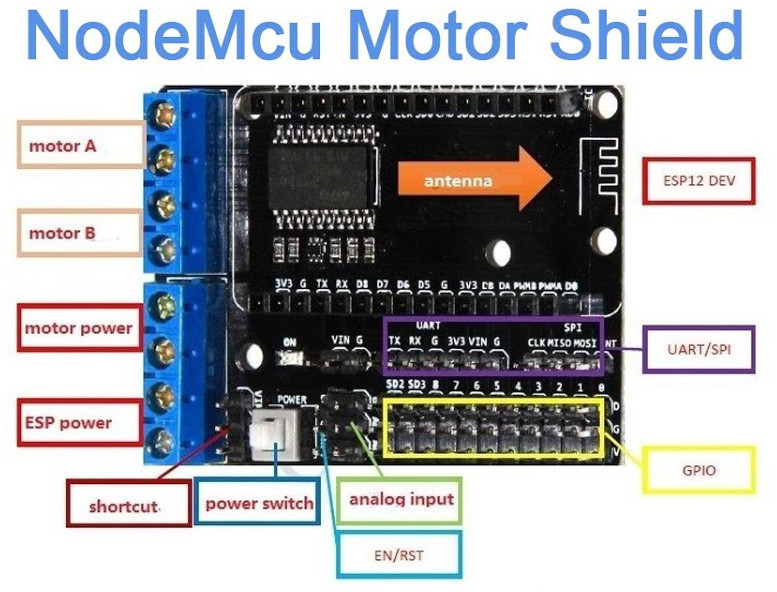
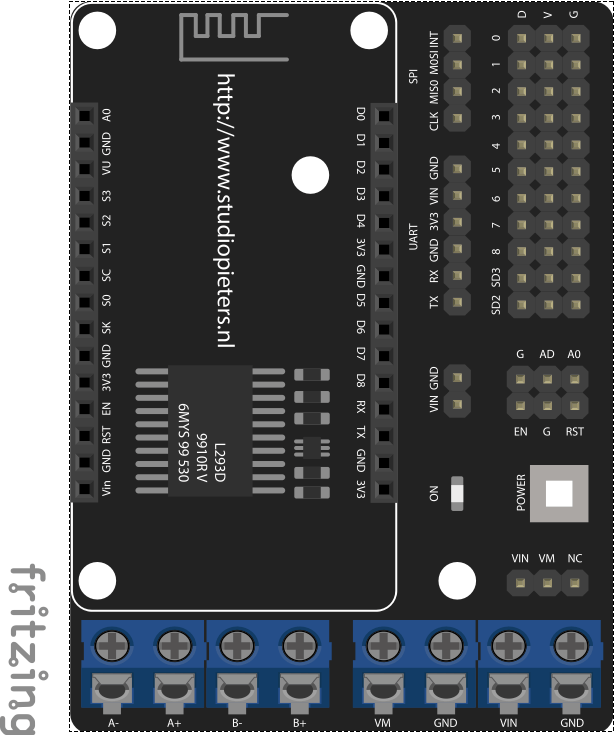
- NodeMCU Motor Shield pinout
- Códigos WiFi
- Otros códigos de ejemplo
Están basados en el ESP12E, el cual es una variante del ESP8266.
Voltaje de entrada (USB): 5V
Voltaje de salida en los pines: 3.3V
Voltaje de referencia en el ADC: 3.3V
Corriente nominal por pin: 12mA
Frecuencia de procesador: 80MHz (160MHz max.)
4MB Flash
Consumo de corriente en stand-by @80MHz: 80mA
Consumo de corriente al recibir una peticion (librería WebServer en modo de punto de acceso) @ 80MHz: 90mA
Consumo de corriente al utilizar HTTPClient.get() @ 80 MHz: 100-110mA
Consumo de corriente en stand-by @160MHz: 90mA
Consumo de corriente al recibir una peticion (librería WebServer en modo de punto de acceso) @ 160MHz: 90-100mA
Consumo de corriente al utilizar HTTPClient.get() @ 160 MHz: 100-110mA
Al programar podemos usar los pines con los nombres que vemos a continuación, así es equivalente usar el pin D5 o el 14.
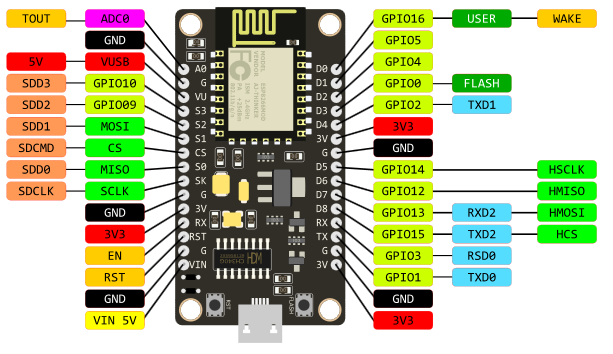
Es importante saber que NodeMCU tiene sólo un pin analógico (A0) y el resto son digitales. Esto es importante a la hora de conectar algunos sensores como el sensor de distancia SHARP. Igualmente, algunos pines tienen funciones especiales y pueden estar reservados para uso exclusivo (las funciones SCK, MISO o MOSI en RFID522 o OLED)
| D (valid for Arduino IDE) | INTERNAL |
|---|---|
| D0 | 16 |
| D1 | 5 // I2C Bus SCL (clock) // PWMA (Motor A Speed--> 0 to 1024) |
| D2 | 4 // I2C Bus SDA (data) // PWMA (Motor B Speed--> 0 to 1024) |
| D3 | 0 // DIRA (Motor A --> HIGH forward) |
| D4 | 2 // Same as "LED_BUILTIN", but inverted logic (HIGH turns off) // DIRB (Motor B) |
| D5 | 14 // SPI Bus SCK (clock) |
| D6 | 12 // SPI Bus MISO |
| D7 | 13 // SPI Bus MOSI |
| D8 | 15 // SPI Bus SS (CS) |
| D9 | 3 // RX0 (Serial console) |
| D10 | 1 // TX0 (Serial console) |
En los conectores para sensores y motores hay que respetar la polaridad de los pines:
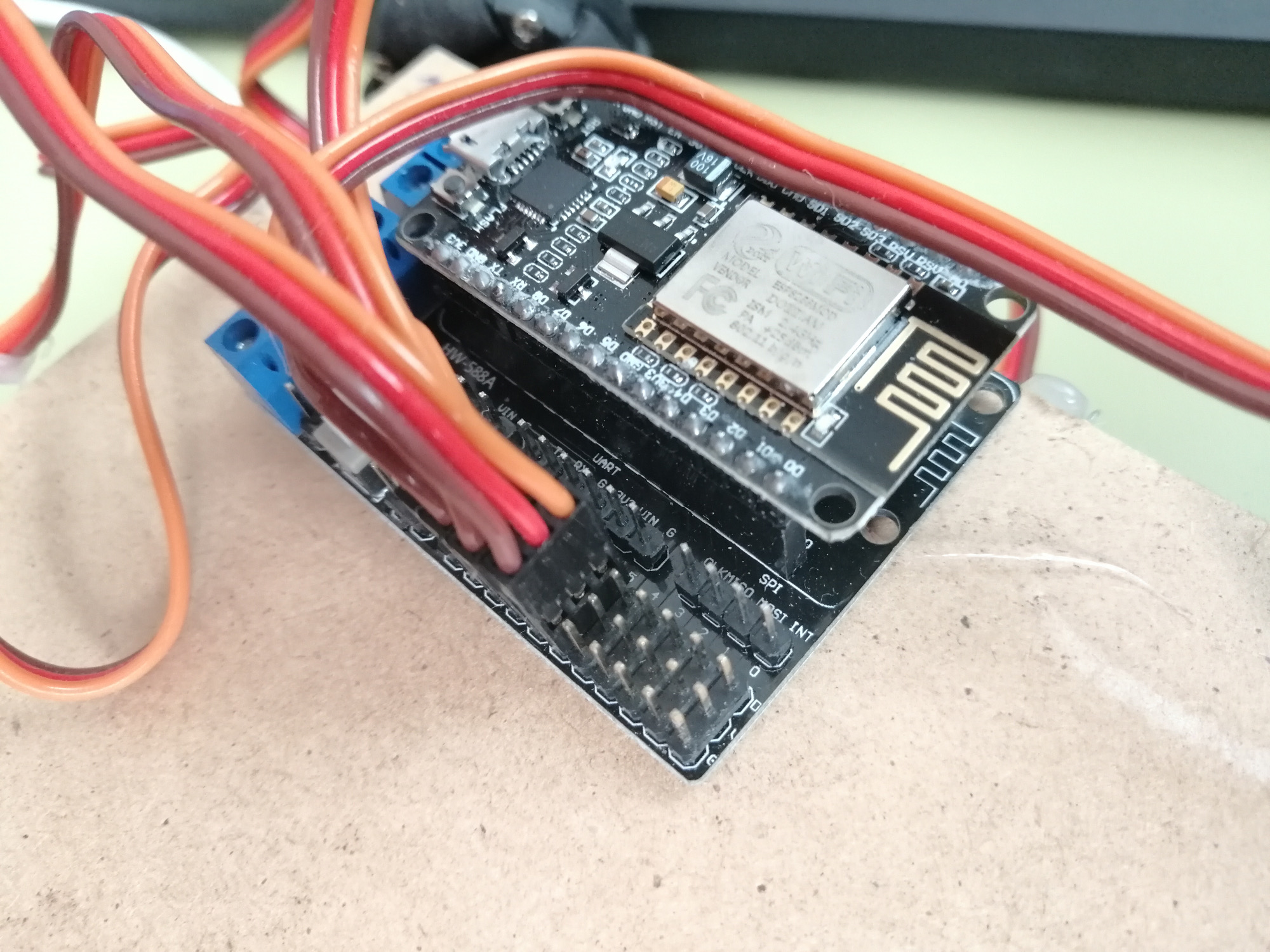
* D--> DATOS (D0, D1, ...). En la imagen es el cable naranja.
* V--> 3V3 (para la alimentación del sensor). En la imagen es el rojo.
* G--> GND (negativo, para la alimentación del sensor). En la imagen es el marrón.
En el Shield vemos un "shortcut", que es para poner un jumper entre los pines VIN y VM si queremos que los motores se alimenten con la misma fuente que la placa. Si no colocamos el jumper entonces lo motores se alimentarán con los conectores azules VM y GND.