IMU
Este sensor inercial tiene incorporados un acelerómetro de 3 ejes (de +/-16g), un magnetómetro de 3 ejes (de +/-8.1 gauss), un giróscopo de 3 ejes (de +/-2000 dps) y un sensor barométrico BMP180.
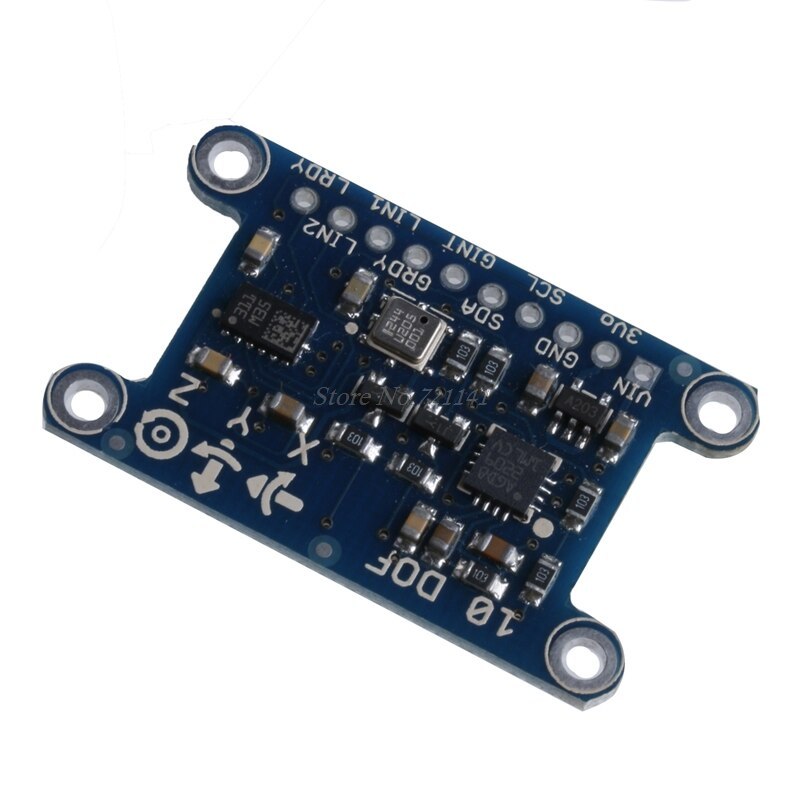
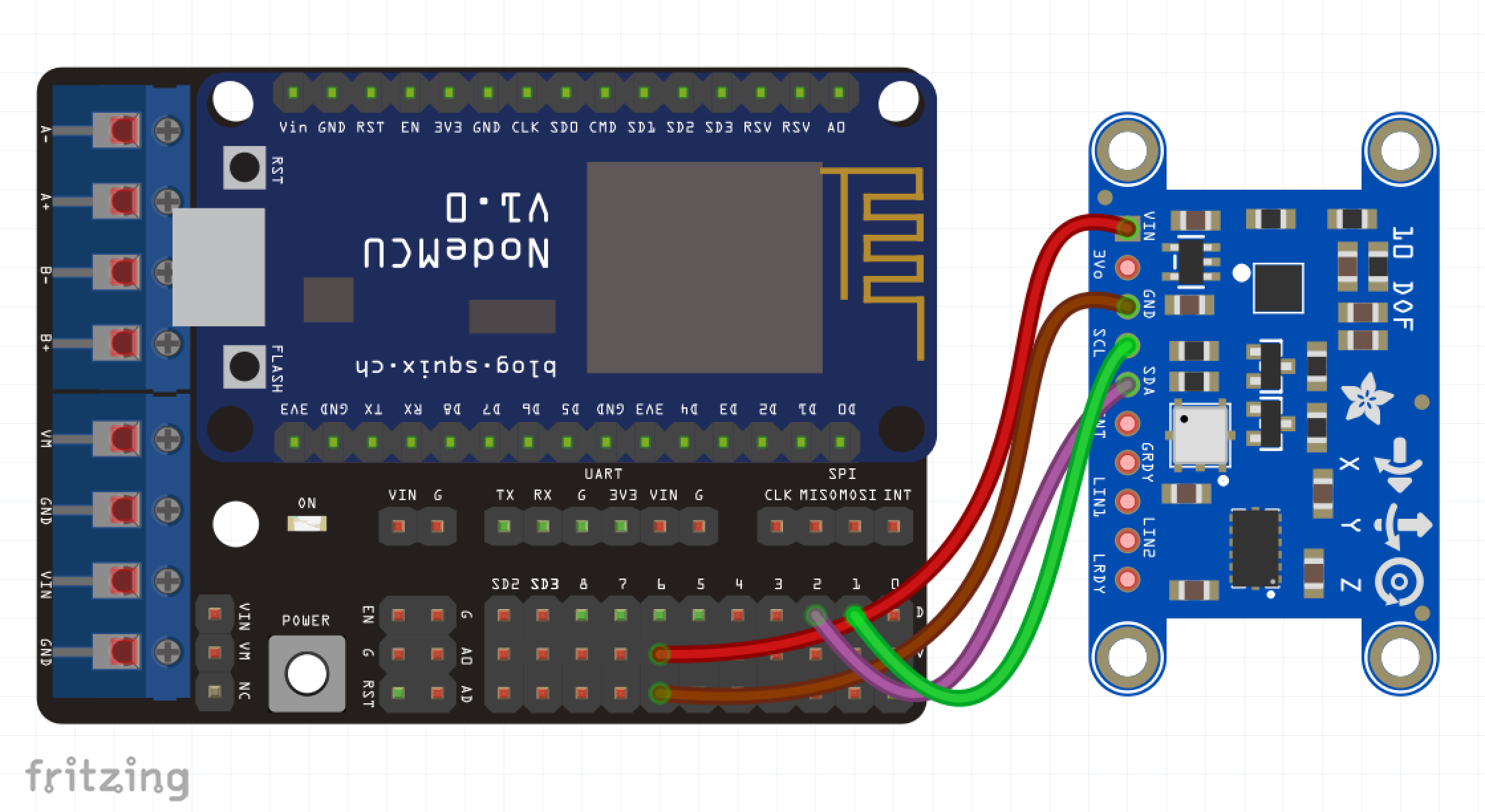
El fabricante nos indica la funcionalidad de algunos pines, que es:
Vin - 3V3 to 5V
GINT - The interrupt pin on the L3GD20 gyroscope
GRDY - The 'ready' pin on the L3GD20 gyroscope
LIN1 - Interrupt pin 1 on the LSM303DLHC
LIN2 - Interrupt pin 2 on the LSM303DLHC
LRDY- The ready pin on the LSM303DLHC
Para usarlo es necesario instalar las librerías descritas en este enlace.
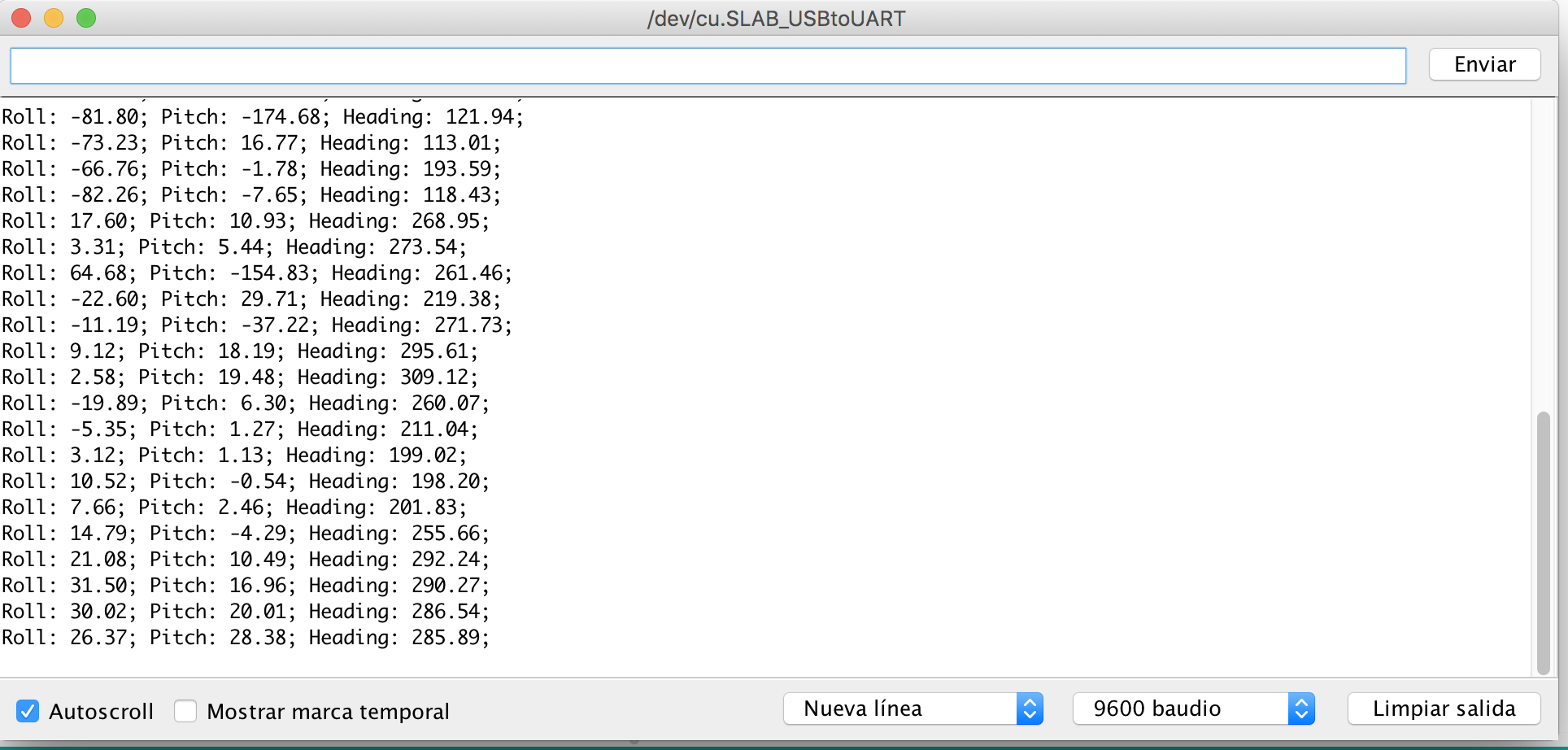
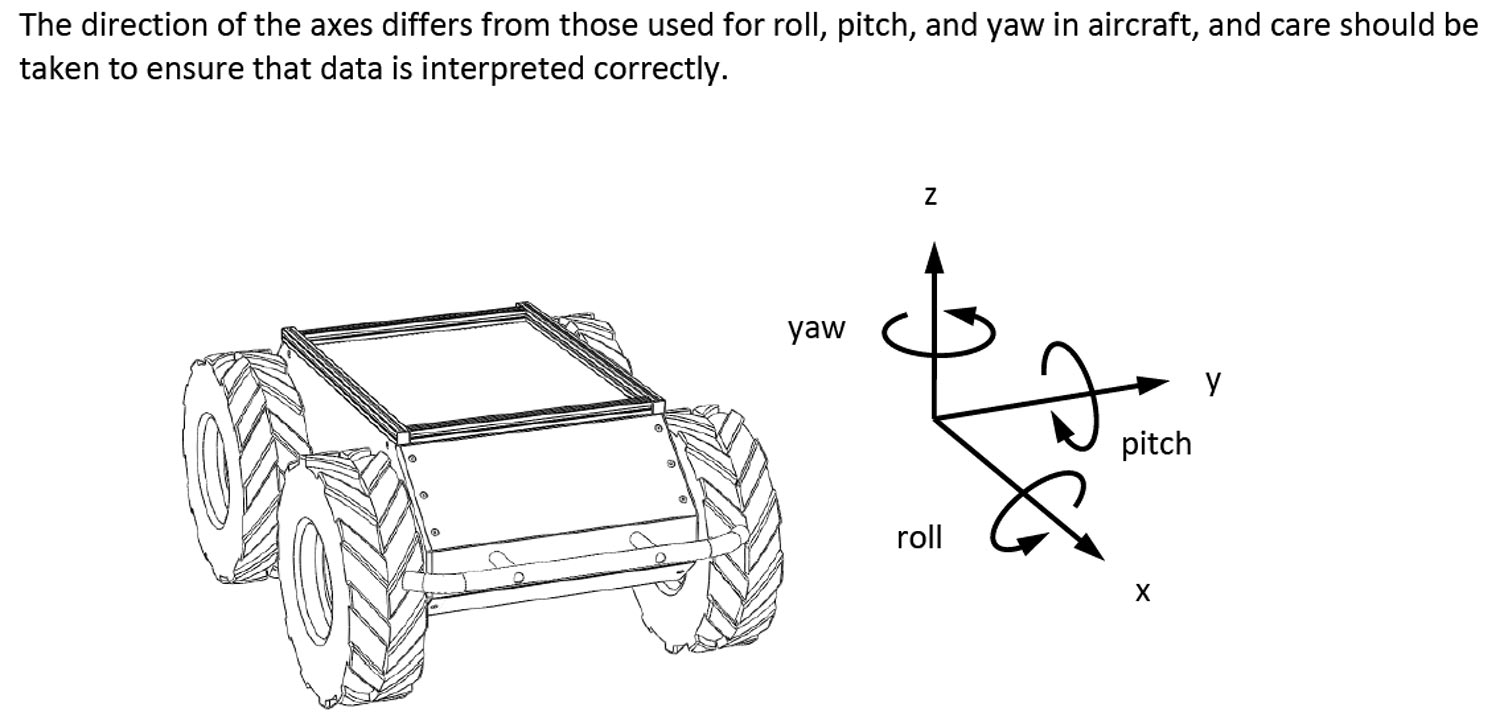
Con este sensor podemos calcular la orientación RPY (Roll-Pitch-Yaw) de un robot:
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_LSM303_U.h>
#include <Adafruit_L3GD20_U.h>
#include <Adafruit_10DOF.h>
/* Assign a unique ID to the sensors */
Adafruit_10DOF dof = Adafruit_10DOF();
Adafruit_LSM303_Accel_Unified accel = Adafruit_LSM303_Accel_Unified(30301);
Adafruit_LSM303_Mag_Unified mag = Adafruit_LSM303_Mag_Unified(30302);
/**************************************************************************/
/*!
@brief Initialises all the sensors used by this example
*/
/**************************************************************************/
void initSensors()
{
if(!accel.begin())
{
/* There was a problem detecting the LSM303 ... check your connections */
Serial.println(F("Ooops, no LSM303 detected ... Check your wiring!"));
while(1);
}
if(!mag.begin())
{
/* There was a problem detecting the LSM303 ... check your connections */
Serial.println("Ooops, no LSM303 detected ... Check your wiring!");
while(1);
}
}
/**************************************************************************/
/*!
*/
/**************************************************************************/
void setup(void)
{
Serial.begin(9600);
Serial.println(F("Adafruit 10 DOF Pitch/Roll/Heading Example")); Serial.println("");
/* Initialise the sensors */
initSensors();
}
/**************************************************************************/
/*!
@brief Constantly check the roll/pitch/heading/altitude/temperature
*/
/**************************************************************************/
void loop(void)
{
sensors_event_t accel_event;
sensors_event_t mag_event;
sensors_vec_t orientation;
/* Calculate pitch and roll from the raw accelerometer data */
accel.getEvent(&accel_event);
if (dof.accelGetOrientation(&accel_event, &orientation))
{
/* 'orientation' should have valid .roll and .pitch fields */
Serial.print(F("Roll: "));
Serial.print(orientation.roll);
Serial.print(F("; "));
Serial.print(F("Pitch: "));
Serial.print(orientation.pitch);
Serial.print(F("; "));
}
/* Calculate the heading using the magnetometer */
mag.getEvent(&mag_event);
if (dof.magGetOrientation(SENSOR_AXIS_Z, &mag_event, &orientation))
{
/* 'orientation' should have valid .heading data now */
Serial.print(F("Heading: "));
Serial.print(orientation.heading);
Serial.print(F("; "));
}
Serial.println(F(""));
delay(1000);
}