Sensor de distancia HCSR04

Este sensor nos devuelve la distancia a la que se encuentra un objeto, para ello hace uso de ultrasonidos como se ve en la imagen a continuación.

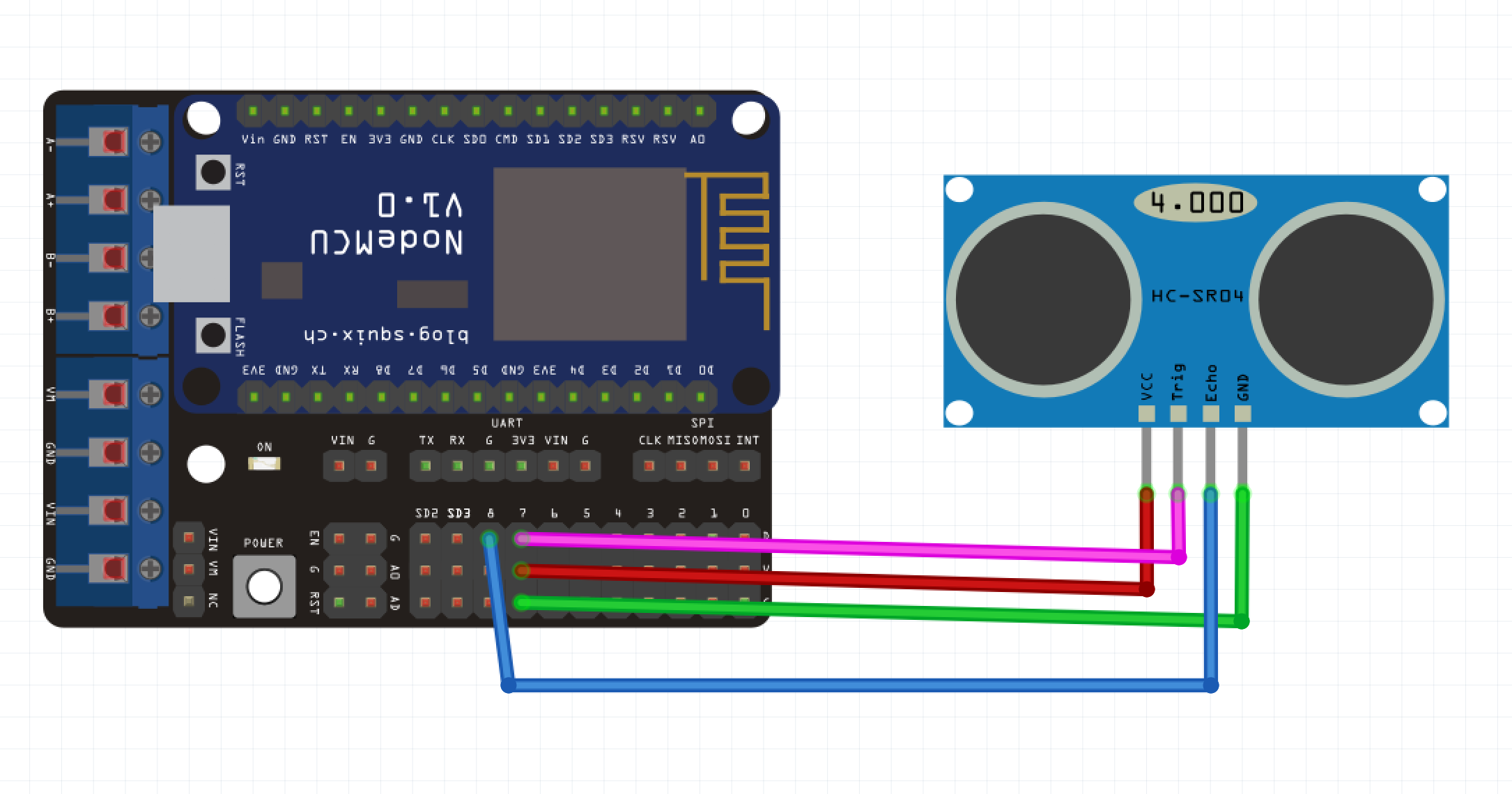
Si conectamos los pines de la siguiente forma, podremos usar el código que aparece a continuación. En este código se mide el tiempo que el ultrasonido tarda en rebotar contra el obstáculo y se calcula la distancia a la que se encuentra el mismo.
/*
* Ultrasonic Sensor HC-SR04 and Arduino Tutorial
*
* by Dejan Nedelkovski,
* www.HowToMechatronics.com
*
*/
// defines pins numbers
const int trigPin = D7;
const int echoPin = D8;
// defines variables
long duration;
int distance;
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600); // Starts the serial communication
}
void loop() {
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculating the distance
distance= duration*0.034/2;
// Prints the distance on the Serial Monitor
Serial.print("Distance: ");
Serial.println(distance);
}
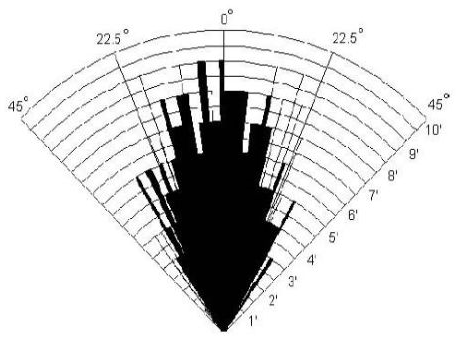
Hay que tener en cuenta que el sensor emite los ultrasonidos en haz lobular y por tanto puede detectar obstáculos con distinta precisión en distinto ángulo o incluso interferir con otro sensor.