Sensor infrarrojo de obstáculos (YL63)

Este sensor es binario, nos detecta si hay obstáculo o no. Para ello se selecciona la distancia de detección mediante un destornillador, girando el potenciómetro que tiene el sensor. Por tanto no se puede determinar esta distancia mediante el código.
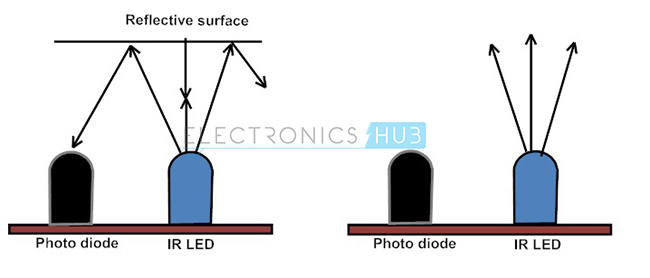
Tiene un rango de medición entre 2 y 30cm, pudiéndose alimentar a 3,3V o 5V.
// IR Obstacle Collision Detection Module
// Henry's Bench
int LED = LED_BUILTIN; // Use the onboard Uno LED
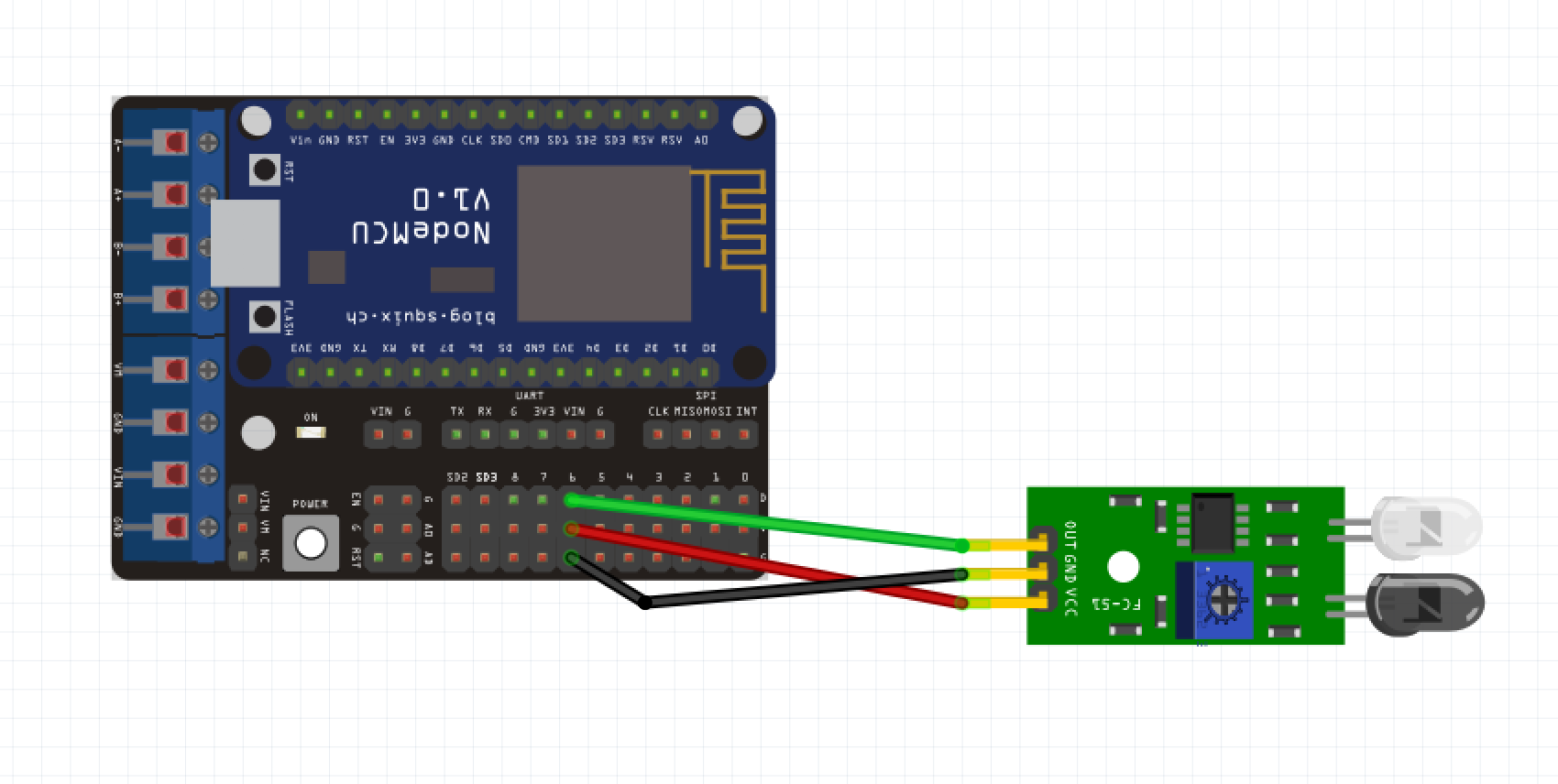
int isObstaclePin = D6; // This is our input pin
int isObstacle = HIGH; // HIGH MEANS NO OBSTACLE
void setup() {
pinMode(LED, OUTPUT);
pinMode(isObstaclePin, INPUT);
Serial.begin(9600);
}
void loop() {
isObstacle = digitalRead(isObstaclePin);
if (isObstacle == LOW)
{
Serial.println("OBSTACLE!!, OBSTACLE!!");
digitalWrite(LED, HIGH);
}
else
{
Serial.println("clear");
digitalWrite(LED, LOW);
}
delay(200);
}