User_App_NoROS_ExportURDFOnWindows
Note: This tutorial assumes that you have completed tutorials:
Watch this tutorial video for an example of how to build a URDF robot from scratch.
- Import a URDF model, as outlined in Import Urdf On Windows Without ROS.
- Make any desired changes (e.g.: change a joint axis, move a link into the correct position, etc.). For an idea of how to accomplish this, watch the tutorial video linked above.
- Navigate to the root game object of the URDF model that you want to export. It will have a UrdfRobot script attached.
- In the Inspector of the UrdfRobot script, click "Export Robot to URDF file."
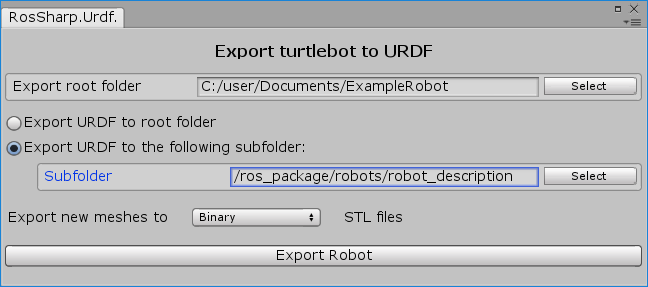
- In the editor window that opens, define an export location and other preferences.
- Click "Export Robot."
Note: In step 3, select "Export URDF to the following subfolder" in order to make all the mesh and resource paths in the URDF file be relative to a subfolder of the export location. This is useful when publishing/visualizing the robot in ROS, especially in situations where the URDF files should not be placed directly in the ROS package root folder.
A URDF model created in ROS# can be used like any other robot. Watch this video to see an example robot being manipulated in Unity, RViZ, and Gazebo.
Next tutorial: 3.3 Animate a Robot Model in Unity
© Siemens AG, 2017-2025