User_App_NoROS_ImportURDFOnWindows
Note: This tutorial assumes that you have completed tutorials:
- Copy the
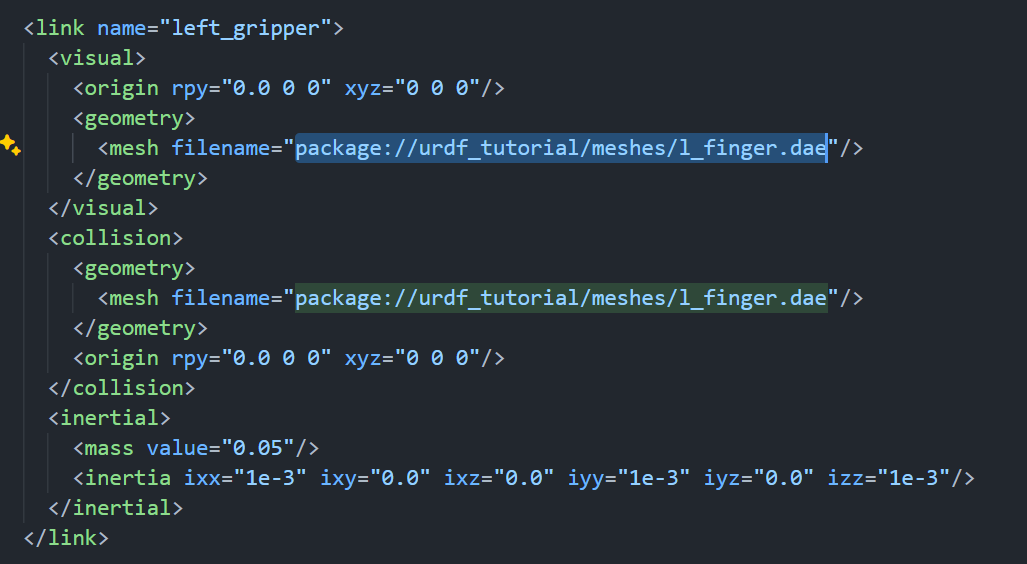
.urdffile into an arbitrary Asset subfolder, that is,Assets/Urdf/<package_name>/<urdf_name>.urdf. - Copy all resources (mesh and texture files) into the same subfolder, keeping the original folder structure of the ROS package. At the bottom left you can see the R2D2 URDF file. We can see that it is looking for the mesh file in
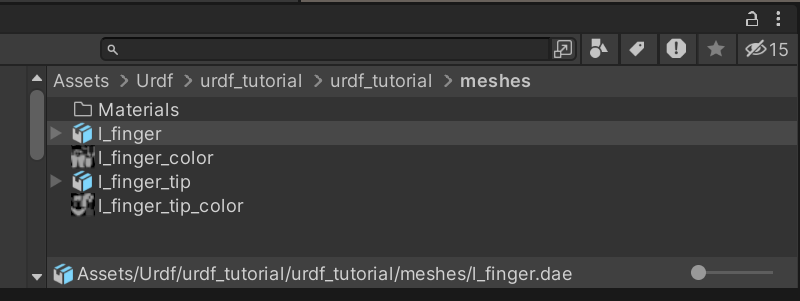
package://urdf_tutorial/meshes/1_finger.dae. Obviously this is in the ROS installation folder, but we need to mimic that. Below, on the right, you can see the Unity folder structure. The mesh location isAssets/Urdf/urdf_tutortial/urdf_tutortial/meshes/1_finger.dae, as if we treated thepacakge://part of the original path asAssets/Urdf/urdf_tutortial/. Similarly, all robot resources should be placed like this.
- In Unity, find the
.urdffile in the Project window pane. Right click the file and selectImport Robot from URDFin the context menu. (Alternative method: in Unity's menu bar, clickGameObject>3D Object>URDF Model (import)and select the.urdffile.)
- You can follow this video's first part for this example.
- Copy the
/opt/ros/humble/share/urdf_tutorial/urdf/07-physics.urdf(from Ubuntu) to:
/Assets/Urdf/urdf_tutorial/07-physics.urdfIf you are using WSL, you can directly access your Windows files and copy within terminal. Your files should be located in
/mnt/c/Users/<user_name>/<unity_project_name>/Assets. See Ubuntu copy command: cp
- Copy the
.daemesh geometry files from/opt/ros/humble/share/urdf_tutorial/meshesto:
/Assets/Urdf/urdf_tutortial/urdf_tutortial/meshes- In Unity click
GameObject>3D Object>URDF Modeland select07-physics.urdf.
Here is an illustration of the resulting R2D2 GameObject which is directly imported into the scene.

Next tutorial: 3.2 Create, Modify and Export a URDF model
© Siemens AG, 2017-2025